Медленная, но упорная поступь экзоскелетов
Спустя полвека после начала работ в области экзоскелетов первые образцы этой аппаратуры готовы отправиться на полноценную работу. Компания Lockheed Martin недавно похвасталась тем, что ее проект HULC (Human Universal Load Carrier – Универсальная погрузочная несущая система для человека) уже не только прошел проведенные совместно с Пентагоном полевые испытания, но и уже готов к серийному производству. Экзоскелету HULC сейчас «дышат в спину» сразу несколько аналогичных проектов других фирм. Но такое обилие конструкций было не всегда.

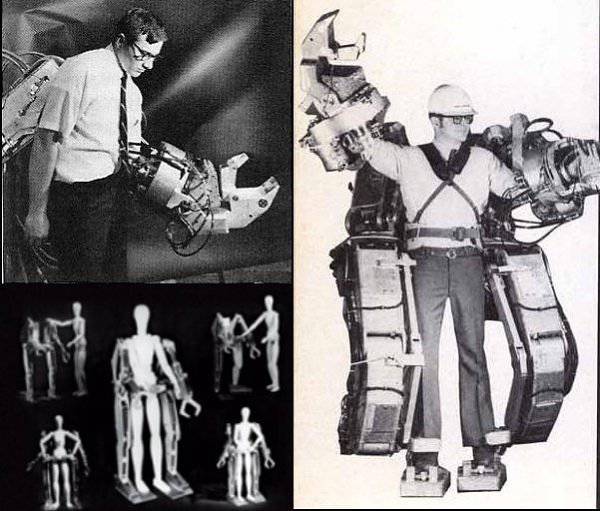
Собственно идея создания какого-либо прибора, который мог бы надеваться человеком и значительно улучшать его физические качества, появилась в первой половине прошлого века. Однако до определенного времени она была всего лишь очередной придумкой писателей-фантастов. Разработка практически применимой системы была начата только в самом конце пятидесятых годов. Компания General Electric под эгидой американского военного ведомства развернула проект под названием Hardiman. Техническое задание было смелым: экзоскелет от GE должен был позволять человеку оперировать с грузами весом до полутора тысяч фунтов (около 680 килограмм). В случае удачного завершения проекта экзоскелет Hardiman имел бы замечательные перспективы. Так, военные предполагали использовать новую технику для облегчения работы оружейников в военно-воздушных силах. Кроме того, «в очереди» стояли атомщики, строители и представители массы других отраслей. Но даже через десять лет после начала программы инженерам «Дженерал Электрик» так и не удалось воплотить в металле все задуманное. Было построено несколько прототипов, в том числе и рабочая механическая рука. Огромная клешня «Хардимена» имела гидравлический привод и могла поднимать 750 фунтов груза (примерно 340 кг). На основе одной работоспособной «перчатки» можно было создать и вторую. Но перед конструкторами встала другая проблема. Механические «ноги» экзоскелета никак не хотели работать правильно. Прототип Hardiman с одной рукой и двумя ногами-опорами весил под 750 килограммов, при этом максимальная расчетная грузоподъемность была меньше собственного веса. Из-за такого веса и особенностей центровки экзоскелета при подъеме груза зачастую вся конструкция начинала вибрировать, что несколько раз приводило к опрокидыванию. С горькой иронией авторы проекта назвали это явление «механической пляской святого Витта». Как ни бились конструкторы General Electric, им так и не удалось справиться с центровкой и вибрациями. В самом начале 70-х проект Hardiman был закрыт.
В последующие годы работы в направлении экзоскелетов шли неактивно. Ими время от времени начинали заниматься различные организации, но почти всегда должного результата не следовало. При этом не всегда целью создания экзоскелета было его военное применение. В 70-х годах сотрудники Массачусетского технологического университета без особых успехов разрабатывали аппаратуру подобного класса, предназначенную для реабилитации инвалидов с повреждениями опорно-двигательного аппарата. К сожалению, тогда на пути инженеров тоже оказались проблемы синхронизации различных узлов костюма. Следует отметить, что у экзоскелетов есть целый ряд характерных особенностей, которые ни капли не облегчают их создание. Так, значительное улучшение физических возможностей человека-оператора требует соответствующего источника энергии. Последний, в свою очередь, увеличивает габариты и собственный вес всего аппарата. Вторая загвоздка кроется во взаимодействии человека и экзоскелета. Принцип работы такой аппаратуры выглядит следующим образом: человек совершает какое-либо движение рукой или ногой. Специальные датчики, связанные с его конечностями, принимают этот сигнал и передают соответствующую команду на исполнительные элементы – гидро- или электрические механизмы. Одновременно с подачей команд эти же датчики следят за тем, чтобы движение манипуляторов соответствовало движениям оператора. Кроме синхронизации амплитуд движений перед инженерами стоит вопрос временного соответствия. Дело в том, что любая механика имеет некоторое время реакции. Поэтому его нужно минимизировать с целью достаточного удобства пользования экзоскелетом. В случае с небольшими компактными экзоскелетами, на которые сейчас делается упор, синхронизация движений человека и машины имеет особый приоритет. Поскольку компактный экзоскелет не позволяет увеличить опорную поверхность и т.п., механика, которая не успевает двигаться вместе с человеком, может неблагоприятно сказаться на использовании. К примеру, несвоевременное движение механической «ноги» может привести к тому, что человек попросту потеряет равновесие и упадет. И это еще далеко не все проблемы. Очевидно, что нога человека имеет меньше степеней свободы, нежели рука, не говоря уже о кисти и пальцах.
Новейшая история экзоскелетов военного назначения началась в 2000 году. Тогда американское агентство DARPA инициировало начало программы EHPA (Exoskeletons for Human Performance Augmentation – Экзоскелеты для увеличения производительности человека). Программа EHPA была частью более масштабного проекта Land Warrior, предусматривавшего создание облика солдата будущего. Однако в 2007 году «Лэнд уорриор» был отменен, но его экзоскелетная часть была продолжена. Целью проекта EHPA было создание т.н. полного экзоскелета, имевшего в своем составе усилители для рук и ног человека. При этом какое-либо вооружение или бронирование не требовалось. Ответственные лица DARPA и Пентагона прекрасно понимали, что нынешнее состояние дел в области экзоскелетов попросту не позволяет оснащать их дополнительными функциями. Поэтому техническое задание по программе EHPA подразумевает только возможность длительной переноски солдатом в экзоскелете груза массой около 100 килограммов и повышение его скорости передвижения.
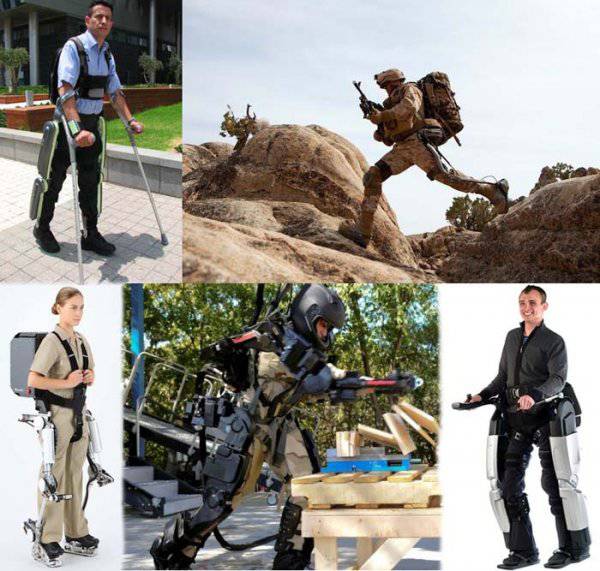
Свое желание участвовать в разработке новой техники выразили компания Sacros и университет Беркли (США), а также японская Cyberdyne Systems. С момента начала программы прошло двенадцать, лет и за это время состав участников претерпел некоторые изменения. К настоящему времени Sacros вошла в состав концерна Raytheon, а отдел университета под названием Berkeley Bionics стал подразделением Lockheed Martin. Так или иначе, сейчас существует три прототипа экзоскелетов, созданных по программе EHPA: Lockheed Martin HULC, Cyberdyne HAL и Raytheon XOS.
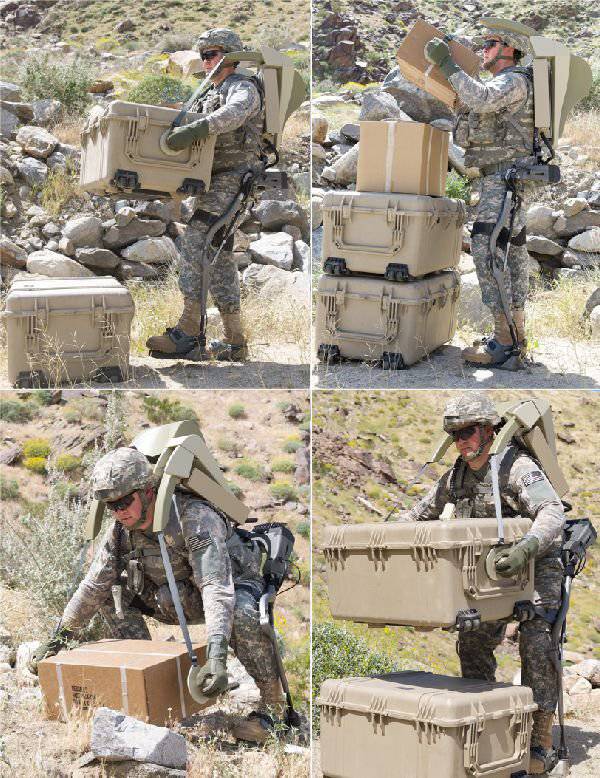
Первый из перечисленных экзоскелетов – HULC – не в полной мере отвечает требованиям DARPA. Дело в том, что25-килограммовая конструкция имеет в своем составе только систему поддержки спины и механические «ноги». Поддержка рук в HULC не реализована. В то же время, физические возможности оператора HULC повышаются за счет того, что через систему поддержки спины большая часть нагрузки на руки передается на силовые элементы экзоскелета и в итоге «уходит» в землю. Благодаря примененной системе солдат может нести на себе до 90 килограмм груза и при этом испытывать нагрузку, отвечающую всем армейским нормативам. HULC оснащается литий-ионным аккумулятором, емкости которого хватает на работу в течение восьми часов. В экономном режиме человек в экзоскелете может ходить со скоростью в 4-5 километров в час. Максимально возможная скорость HULC составляет 17-18 км/ч, однако такой режим работы системы значительно сокращает время функционирования от одной зарядки аккумуляторов. В будущем «Локхид Мартин» обещают оснастить HULC топливными элементами, емкости которых будет хватать на сутки работы. Кроме того, в последующих версиях конструкторы обещают «роботизировать» руки, что значительно повысит возможности пользователя экзоскелета.

Компания Raytheon на данный момент представила два в некоторой мере похожих экзоскелета с индексами XOS-1 и XOS-2. Они отличаются массогабаритными параметрами и, как следствие, рядом практических характеристик. В отличие от HULC, семейство XOS оснащено системой разгрузки рук. Оба этих экзоскелета могут поднимать вес, сравнимый с их собственной массой около 80-90 килограмм. Примечательно, что конструкция обоих XOS позволяет устанавливать на механические руки различные манипуляторы. Следует заметить, что XOS-1 и XOS-2 пока что имеют значительное энергопотребление. Из-за этого они пока не являются автономными и требуют внешнего питания. Соответственно, о максимальной скорости перемещения и времени работы от батарей речи пока не идет. Зато, как считают в Raytheon, необходимость в питании по кабелю не станет препятствием для использования XOSов на складах или военных базах, где есть соответствующий источник электроэнергии.

Третий образец программы EHPA – Cyberdyne HAL. На сегодняшний день актуальной является версия HAL-5. Этот экзоскелет в некоторой мере является смесью первых двух. Как и HULC, он имеет возможность автономного использования – аккумуляторов хватает на 2,5-3 часа. С семейством XOS разработку Cyberdyne Systems объединяет «полнота» конструкции: в ее составе есть системы поддержки и рук, и ног. Однако грузоподъемность HAL-5 не превышает пары десятков килограмм. Похожим образом дело обстоит и со скоростными качествами этой разработки. Дело в том, что японские конструкторы сделали упор не на военное использование, но на реабилитацию инвалидов. Очевидно, что таким пользователям высокая скорость или грузоподъемность попросту не нужна. Соответственно, если HAL-5 в нынешнем своем состоянии заинтересует военных, можно будет сделать на его основе новый экзоскелет, заточенный под военное применение.
Из всех представленных на конкурс EHPA вариантов перспективных экзоскелетов до испытаний совместно с военными пока дошел только HULC. Ряд особенностей прочих проектов все еще не позволяют начать их полевые испытания. В сентябре несколько комплектов HULC будет отправлено в части с целью изучения особенностей работы экзоскелета в реальных условиях. Если все пройдет без проблем, то в 2014-15 годах будет начато крупносерийное производство.
А тем временем у ученых и конструкторов появятся более совершенные концепции и конструкции. Наиболее ожидаемым нововведение в области экзоскелетов являются роботизированные перчатки. Имеющиеся манипуляторы пока не слишком удобны для использования инструментов и тому подобных объектов, предназначенных для ручного применения. При этом создание таких перчаток связано с рядом трудностей. В целом, они аналогичны тем, какие имеются и у других агрегатов экзоскелета, но в данном случае проблемы синхронизации усугубляются большим количеством механических элементов, особенностями движения кисти человеческой руки и т.д. Следующим этапом в развитии экзоскелетов будет создание нейроэлектронного интерфейса. Сейчас управление движениями механики осуществляется при помощи датчиков и следящих приводов. Более удобным инженерам и ученым видится применение системы управления с электродами, снимающими нервные импульсы человека. Среди прочего такая система позволит снизить время реакции механизмов и, как следствие, повысить эффективность работы всего экзоскелета.
Что касается практического применения, то за последние полвека воззрения на него почти не поменялись. По-прежнему основными пользователями перспективных систем считаются военные. Они могут использовать экзоскелеты для погрузочно-разгрузочных работ, подготовки боеприпасов, а кроме того, и в боевой обстановке, для повышения возможностей бойцов. Надо заметить, грузоподъемность экзоскелетов будет полезна не только военным. Широкое распространение техники, позволяющей человеку значительно увеличивать свои физические возможности, способно изменить облик всей логистики и грузоперевозок. К примеру, время на загрузку грузового полуприцепа при отсутствии автопогрузчиков уменьшится на десятки процентов, что повысит эффективность всей системы перевозок. Наконец, экзоскелеты с управлением при помощи нервных импульсов помогут инвалидам-опорникам снова зажить полной жизнью. Причем большие надежды возлагаются именно на нейроэлектронный интерфейс: при повреждениях позвоночника и т.п. травмах сигналы от мозга могут не доходить до определенного участка тела. Если же «перехватывать» их до поврежденного участка нерва и посылать на систему управления экзоскелетом, то человек перестанет быть прикованным к инвалидному креслу или кровати. Таким образом, военные разработки в очередной раз могут улучшить жизнь не только военным. Только пока, строя большие планы, следует помнить об опытной эксплуатации экзоскелета Lockheed Martin HULC, которая начнется только осенью. По ее результатам можно будет судить и о перспективах всей отрасли, и об интересе к ней со стороны потенциальных пользователей.
По материалам сайтов:
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
Собственно идея создания какого-либо прибора, который мог бы надеваться человеком и значительно улучшать его физические качества, появилась в первой половине прошлого века. Однако до определенного времени она была всего лишь очередной придумкой писателей-фантастов. Разработка практически применимой системы была начата только в самом конце пятидесятых годов. Компания General Electric под эгидой американского военного ведомства развернула проект под названием Hardiman. Техническое задание было смелым: экзоскелет от GE должен был позволять человеку оперировать с грузами весом до полутора тысяч фунтов (около 680 килограмм). В случае удачного завершения проекта экзоскелет Hardiman имел бы замечательные перспективы. Так, военные предполагали использовать новую технику для облегчения работы оружейников в военно-воздушных силах. Кроме того, «в очереди» стояли атомщики, строители и представители массы других отраслей. Но даже через десять лет после начала программы инженерам «Дженерал Электрик» так и не удалось воплотить в металле все задуманное. Было построено несколько прототипов, в том числе и рабочая механическая рука. Огромная клешня «Хардимена» имела гидравлический привод и могла поднимать 750 фунтов груза (примерно 340 кг). На основе одной работоспособной «перчатки» можно было создать и вторую. Но перед конструкторами встала другая проблема. Механические «ноги» экзоскелета никак не хотели работать правильно. Прототип Hardiman с одной рукой и двумя ногами-опорами весил под 750 килограммов, при этом максимальная расчетная грузоподъемность была меньше собственного веса. Из-за такого веса и особенностей центровки экзоскелета при подъеме груза зачастую вся конструкция начинала вибрировать, что несколько раз приводило к опрокидыванию. С горькой иронией авторы проекта назвали это явление «механической пляской святого Витта». Как ни бились конструкторы General Electric, им так и не удалось справиться с центровкой и вибрациями. В самом начале 70-х проект Hardiman был закрыт.
В последующие годы работы в направлении экзоскелетов шли неактивно. Ими время от времени начинали заниматься различные организации, но почти всегда должного результата не следовало. При этом не всегда целью создания экзоскелета было его военное применение. В 70-х годах сотрудники Массачусетского технологического университета без особых успехов разрабатывали аппаратуру подобного класса, предназначенную для реабилитации инвалидов с повреждениями опорно-двигательного аппарата. К сожалению, тогда на пути инженеров тоже оказались проблемы синхронизации различных узлов костюма. Следует отметить, что у экзоскелетов есть целый ряд характерных особенностей, которые ни капли не облегчают их создание. Так, значительное улучшение физических возможностей человека-оператора требует соответствующего источника энергии. Последний, в свою очередь, увеличивает габариты и собственный вес всего аппарата. Вторая загвоздка кроется во взаимодействии человека и экзоскелета. Принцип работы такой аппаратуры выглядит следующим образом: человек совершает какое-либо движение рукой или ногой. Специальные датчики, связанные с его конечностями, принимают этот сигнал и передают соответствующую команду на исполнительные элементы – гидро- или электрические механизмы. Одновременно с подачей команд эти же датчики следят за тем, чтобы движение манипуляторов соответствовало движениям оператора. Кроме синхронизации амплитуд движений перед инженерами стоит вопрос временного соответствия. Дело в том, что любая механика имеет некоторое время реакции. Поэтому его нужно минимизировать с целью достаточного удобства пользования экзоскелетом. В случае с небольшими компактными экзоскелетами, на которые сейчас делается упор, синхронизация движений человека и машины имеет особый приоритет. Поскольку компактный экзоскелет не позволяет увеличить опорную поверхность и т.п., механика, которая не успевает двигаться вместе с человеком, может неблагоприятно сказаться на использовании. К примеру, несвоевременное движение механической «ноги» может привести к тому, что человек попросту потеряет равновесие и упадет. И это еще далеко не все проблемы. Очевидно, что нога человека имеет меньше степеней свободы, нежели рука, не говоря уже о кисти и пальцах.
Новейшая история экзоскелетов военного назначения началась в 2000 году. Тогда американское агентство DARPA инициировало начало программы EHPA (Exoskeletons for Human Performance Augmentation – Экзоскелеты для увеличения производительности человека). Программа EHPA была частью более масштабного проекта Land Warrior, предусматривавшего создание облика солдата будущего. Однако в 2007 году «Лэнд уорриор» был отменен, но его экзоскелетная часть была продолжена. Целью проекта EHPA было создание т.н. полного экзоскелета, имевшего в своем составе усилители для рук и ног человека. При этом какое-либо вооружение или бронирование не требовалось. Ответственные лица DARPA и Пентагона прекрасно понимали, что нынешнее состояние дел в области экзоскелетов попросту не позволяет оснащать их дополнительными функциями. Поэтому техническое задание по программе EHPA подразумевает только возможность длительной переноски солдатом в экзоскелете груза массой около 100 килограммов и повышение его скорости передвижения.
Свое желание участвовать в разработке новой техники выразили компания Sacros и университет Беркли (США), а также японская Cyberdyne Systems. С момента начала программы прошло двенадцать, лет и за это время состав участников претерпел некоторые изменения. К настоящему времени Sacros вошла в состав концерна Raytheon, а отдел университета под названием Berkeley Bionics стал подразделением Lockheed Martin. Так или иначе, сейчас существует три прототипа экзоскелетов, созданных по программе EHPA: Lockheed Martin HULC, Cyberdyne HAL и Raytheon XOS.
Первый из перечисленных экзоскелетов – HULC – не в полной мере отвечает требованиям DARPA. Дело в том, что25-килограммовая конструкция имеет в своем составе только систему поддержки спины и механические «ноги». Поддержка рук в HULC не реализована. В то же время, физические возможности оператора HULC повышаются за счет того, что через систему поддержки спины большая часть нагрузки на руки передается на силовые элементы экзоскелета и в итоге «уходит» в землю. Благодаря примененной системе солдат может нести на себе до 90 килограмм груза и при этом испытывать нагрузку, отвечающую всем армейским нормативам. HULC оснащается литий-ионным аккумулятором, емкости которого хватает на работу в течение восьми часов. В экономном режиме человек в экзоскелете может ходить со скоростью в 4-5 километров в час. Максимально возможная скорость HULC составляет 17-18 км/ч, однако такой режим работы системы значительно сокращает время функционирования от одной зарядки аккумуляторов. В будущем «Локхид Мартин» обещают оснастить HULC топливными элементами, емкости которых будет хватать на сутки работы. Кроме того, в последующих версиях конструкторы обещают «роботизировать» руки, что значительно повысит возможности пользователя экзоскелета.
Компания Raytheon на данный момент представила два в некоторой мере похожих экзоскелета с индексами XOS-1 и XOS-2. Они отличаются массогабаритными параметрами и, как следствие, рядом практических характеристик. В отличие от HULC, семейство XOS оснащено системой разгрузки рук. Оба этих экзоскелета могут поднимать вес, сравнимый с их собственной массой около 80-90 килограмм. Примечательно, что конструкция обоих XOS позволяет устанавливать на механические руки различные манипуляторы. Следует заметить, что XOS-1 и XOS-2 пока что имеют значительное энергопотребление. Из-за этого они пока не являются автономными и требуют внешнего питания. Соответственно, о максимальной скорости перемещения и времени работы от батарей речи пока не идет. Зато, как считают в Raytheon, необходимость в питании по кабелю не станет препятствием для использования XOSов на складах или военных базах, где есть соответствующий источник электроэнергии.

Третий образец программы EHPA – Cyberdyne HAL. На сегодняшний день актуальной является версия HAL-5. Этот экзоскелет в некоторой мере является смесью первых двух. Как и HULC, он имеет возможность автономного использования – аккумуляторов хватает на 2,5-3 часа. С семейством XOS разработку Cyberdyne Systems объединяет «полнота» конструкции: в ее составе есть системы поддержки и рук, и ног. Однако грузоподъемность HAL-5 не превышает пары десятков килограмм. Похожим образом дело обстоит и со скоростными качествами этой разработки. Дело в том, что японские конструкторы сделали упор не на военное использование, но на реабилитацию инвалидов. Очевидно, что таким пользователям высокая скорость или грузоподъемность попросту не нужна. Соответственно, если HAL-5 в нынешнем своем состоянии заинтересует военных, можно будет сделать на его основе новый экзоскелет, заточенный под военное применение.
Из всех представленных на конкурс EHPA вариантов перспективных экзоскелетов до испытаний совместно с военными пока дошел только HULC. Ряд особенностей прочих проектов все еще не позволяют начать их полевые испытания. В сентябре несколько комплектов HULC будет отправлено в части с целью изучения особенностей работы экзоскелета в реальных условиях. Если все пройдет без проблем, то в 2014-15 годах будет начато крупносерийное производство.
А тем временем у ученых и конструкторов появятся более совершенные концепции и конструкции. Наиболее ожидаемым нововведение в области экзоскелетов являются роботизированные перчатки. Имеющиеся манипуляторы пока не слишком удобны для использования инструментов и тому подобных объектов, предназначенных для ручного применения. При этом создание таких перчаток связано с рядом трудностей. В целом, они аналогичны тем, какие имеются и у других агрегатов экзоскелета, но в данном случае проблемы синхронизации усугубляются большим количеством механических элементов, особенностями движения кисти человеческой руки и т.д. Следующим этапом в развитии экзоскелетов будет создание нейроэлектронного интерфейса. Сейчас управление движениями механики осуществляется при помощи датчиков и следящих приводов. Более удобным инженерам и ученым видится применение системы управления с электродами, снимающими нервные импульсы человека. Среди прочего такая система позволит снизить время реакции механизмов и, как следствие, повысить эффективность работы всего экзоскелета.
Что касается практического применения, то за последние полвека воззрения на него почти не поменялись. По-прежнему основными пользователями перспективных систем считаются военные. Они могут использовать экзоскелеты для погрузочно-разгрузочных работ, подготовки боеприпасов, а кроме того, и в боевой обстановке, для повышения возможностей бойцов. Надо заметить, грузоподъемность экзоскелетов будет полезна не только военным. Широкое распространение техники, позволяющей человеку значительно увеличивать свои физические возможности, способно изменить облик всей логистики и грузоперевозок. К примеру, время на загрузку грузового полуприцепа при отсутствии автопогрузчиков уменьшится на десятки процентов, что повысит эффективность всей системы перевозок. Наконец, экзоскелеты с управлением при помощи нервных импульсов помогут инвалидам-опорникам снова зажить полной жизнью. Причем большие надежды возлагаются именно на нейроэлектронный интерфейс: при повреждениях позвоночника и т.п. травмах сигналы от мозга могут не доходить до определенного участка тела. Если же «перехватывать» их до поврежденного участка нерва и посылать на систему управления экзоскелетом, то человек перестанет быть прикованным к инвалидному креслу или кровати. Таким образом, военные разработки в очередной раз могут улучшить жизнь не только военным. Только пока, строя большие планы, следует помнить об опытной эксплуатации экзоскелета Lockheed Martin HULC, которая начнется только осенью. По ее результатам можно будет судить и о перспективах всей отрасли, и об интересе к ней со стороны потенциальных пользователей.
По материалам сайтов:
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
Информация