Турецкий электрический подводный беспилотник STM NETA 300

Два макета АНПА NETA 300 в разных конфигурациях
Турецкая компания STM Defense Technologies Engineering and Trade Inc. известна своими проектами в области надводного и подводного флота и является одним из ключевых подрядчиков военно-морских сил Турции. Теперь она пробует свои силы в сфере необитаемых подводных аппаратов. Недавно компания завершила разработку своего первого проекта этого класса — NETA 300. Он предназначается для мониторинга акваторий и проведения поисковых работ.
Первая попытка
Несколько дней назад в Стамбуле прошла очередная военно-техническая выставка SAHA Expo. Её участниками стали все основные предприятия военно-промышленного комплекса Турции, включая судостроительную компанию STM Defense Technologies Engineering and Trade Inc. На своём стенде компания продемонстрировала материалы по уже известным проектам, а также впервые показала новые разработки.
На выставке STM показала свой новый проект — автономный необитаемый подводный аппарат (АНПА) NETA 300. На своём стенде компания показала два полноразмерных макета этого изделия в разном исполнении, а также раскрыла некоторые ключевые особенности проекта.
Сообщается, что целью проекта является создание АНПА, способного выполнять длительные выходы в море и обследовать акватории в поисках различных объектов. На данном этапе аппарат предназначен только для обнаружения морских мин, однако в будущем планируется расширить его возможности.
АНПА в конфигурации противоминной обороны разрабатывается для военных заказчиков, в первую очередь для ВМС Турции. Следующие версии NETA 300 с дополнительными функциями тоже предложат военным. Кроме того, компания-разработчик полагает, что подобный аппарат будет интересен и гражданским структурам.
К настоящему времени проект NETA 300 успешно прошёл стадии разработки документации и создания опытного образца. Прототип уже прошёл испытания в закрытом бассейне, а недавно начались его проверки на открытой воде. STM пока не раскрывает подробности этих испытаний и не публикует фотографии или видеозаписи, но обещает поделиться ими в ближайшее время.
Сроки выполнения текущих и запланированных работ пока не уточняются. Можно предположить, что испытания и доводка NETA 300 займут значительное время и могут выйти за рамки установленного графика. Дело в том, что компания STM не имеет опыта в разработке АНПА, и ей придётся самостоятельно преодолевать все трудности. Насколько успешно завершится этот процесс — большой вопрос.

Компания-разработчик уже строит планы на будущее. NETA 300 должен стать первым представителем целого семейства АНПА. Перспективные аппараты этой серии будут отличаться друг от друга размерами, ходовыми характеристиками, автономностью и функциями.
Два варианта
На выставке SAHA Expo были представлены два варианта АНПА NETA 300, которые отличались друг от друга внешним видом и некоторыми техническими характеристиками. Оба изделия представляют собой малогабаритные подлодки с дистанционным и автономным управлением, способные нести полезную нагрузку для некоторых задач.
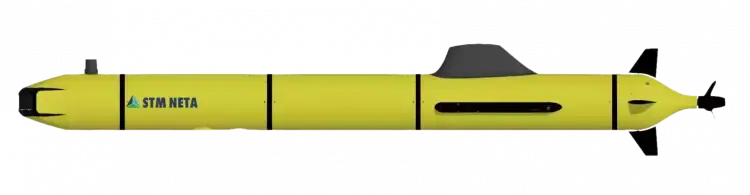
Первый вариант NETA 300 имеет цилиндрический корпус большого удлинения. В носовой части располагается расширенный кожух для установки антенны гидроакустической станции (ГАС). На корме установлен обтекатель с радиотехническим оборудованием, напоминающий рубку подводной лодки. За обтекателем находятся четыре руля и гребной винт.
Второй вариант NETA 300 отличается обтекаемым корпусом большего диаметра. Внутри корпуса удалось полностью скрыть носовую антенну ГАС и обойтись без выступающих элементов. Этот АНПА оснащен носовыми горизонтальными рулями, а в корме остаются три плоскости.

Презентация нового проекта на выставке SAHA Expo
Длину обоих аппаратов можно оценить на уровне 3-3,5 м. Диаметр первого варианта АНПА не превышает 200-250 мм, тогда как второй примерно в полтора раза больше. В базовой конфигурации аппараты имеют массу 70 кг, а вариант с увеличенной продолжительностью плавания весит 85 кг. Прочный корпус позволяет аппарату выполнять задачи на глубинах до 300 м.
АНПА NETA 300 является полностью электрическим. В специальном отсеке корпуса размещены литий-ионные аккумуляторные батареи. В базовой конфигурации их емкость составляет 2,1 кВт⋅ч. Также предусмотрена возможность установки второй секции батарей с аналогичной емкостью.
Ходовой электродвигатель обеспечивает скорость движения до 5 узлов. При использовании штатной батареи продолжительность миссии достигает 12 часов, а полный набор аккумуляторов увеличивает этот параметр вдвое.
На данный момент NETA 300 оснащается гидроакустической станцией бокового обзора с синтезированной апертурой. Тип этой ГАС не раскрывается, но предполагается, что АНПА сможет нести станции разных типов с различными характеристиками. Также рассматривается возможность установки оптико-электронной станции для наблюдения в ближней зоне.

Аппараты NETA 300 способны самостоятельно выполнять заложенную программу. Автопилот использует средства навигации неизвестного типа и ведёт аппарат по заданному маршруту, одновременно применяя целевую аппаратуру. Также имеется режим непосредственной работы по командам оператора с удалённого пульта.
Типичный прорыв
Компания STM представила два опытных образца АНПА NETA 300 и поделилась некоторыми данными о своем проекте. Тем не менее, большая часть информации остается закрытой, а также отсутствуют сведения о ходе и промежуточных результатах испытаний. Тем не менее, уже сейчас можно оценить новый турецкий проект и сделать первые выводы.
NETA 300 — одна из первых турецких разработок в области полноразмерных автономных необитаемых подводных аппаратов. Этот проект имеет большое значение для судостроительной отрасли Турции и демонстрирует её потенциал. Если проект будет успешно завершен, STM и другие компании смогут продолжить развитие этого направления и представить новые АНПА, в т.ч. с преимуществами перед существующими образцами.
Новый проект АНПА должен привлечь внимание потенциальных заказчиков, в первую очередь ВМС Турции. Турецкий флот получает возможность приобрести подводный аппарат отечественного производства и значительно расширить свои оперативные возможности. Как быстро и в каком объеме это предложение будет реализовано, покажет время.

NETA 300 в море — пока в виде графики
Следует отметить, что первый АНПА от компании STM с технической точки зрения не является чем-то выдающимся или особенным. Это типичный современный подводный аппарат среднего класса, предназначенный только для мониторинга и поиска. Он практически не отличается от иностранных аналогов и не имеет явных преимуществ перед ними.
Однако отсутствие отличий или преимуществ не является недостатком. В предложенном виде аппарат NETA 300 способен выполнять свои задачи и обследовать акватории в поисках различных объектов. При этом он обладает определенным потенциалом для модернизации, в ходе которой можно будет улучшить его основные характеристики и расширить возможности.
Новое направление
Таким образом, турецкое судостроение осваивает новое для себя направление и уже демонстрирует первые успехи. На данный момент речь идёт о нескольких АНПА, способных нести только поисковое оборудование. Однако компания STM и другие предприятия обещают в будущем совершенствовать эту технику и создавать новые образцы.
Изделие NETA 300 уже вышло на испытания и сейчас демонстрирует свои возможности, а также дорабатывается и совершенствуется. На проведение нынешних работ требуется некоторое время, но результат должен оправдать все траты и ожидание. Успех нового турецкого АНПА откроет путь другим подобным проектам.
Информация