Американские БПЛА периода Первой и Второй мировых войн

Как и в Великобритании, разработка беспилотников в США началась в годы Первой мировой войны. Но, как и англичане, в силу несовершенства ранних систем дистанционного управления, американцы на раннем этапе не смогли добиться приемлемого результата и сосредоточились на самолётах-снарядах с заранее программируемым автопилотом.
Однако к концу 1930-х годов уровень развития телемеханики сделал системы дистанционного управления пригодными для установки на беспилотных летательных аппаратах, благодаря чему в ходе Второй мировой были созданы серийные образцы, предназначенные для использования в роли воздушных мишеней и для нанесения ударов по надводным и сухопутным целям.
Самолёт-снаряд Curtiss-Sperry Flying Bomb
Хотя для этого не было особых технических предпосылок, ещё до начала Первой мировой в разных странах рассматривалась возможность создания дистанционно управляемых летательных аппаратов или самолётов-снарядов с программируемым автопилотом.
Ключевым элементом в системе стабилизации беспилотного летательного аппарата является гироскоп — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчёта. В 1910 году американский инженер Элмер Амброуз Сперри, работавший над гироскопическими системами для ВМС США, предложил использовать вращающийся гироскоп для автоматического управления самолётом в полёте без участия человека, а также совместить автопилот с аппаратурой дистанционного управления.
Это предложение заинтересовало командование флота, и в 1913 году компании Sperry Gyroscope Company, основанной Э. А. Сперри и занимавшейся производством навигационного оборудования, для опытов был предоставлен гидросамолёт. Управление гидропланом на взлёте осуществлял человек, после чего включался автопилот. Тесты сочли обнадёживающими, но дальнейшего продолжения они не получили.
После начала Первой мировой Э. А. Сперри начал бомбардировать штаб ВМС США предложениями о создании дистанционно управляемой «воздушной торпеды», предназначенной для нанесения ударов по вражеским кораблям и объектам на суше, и просил выделить для этого очень солидную по меркам того времени сумму — $50 000. В составе системы наведения «воздушной торпеды» предполагалось использовать программируемый автопилот и радиокомандную аппаратуру.
После того как программа создания нового вида вооружений получила одобрение в сенате, флот выделил семь поплавочных гидросамолётов Curtiss N-9 и заказал шесть комплектов оборудования. Для создания системы телеуправления Э. А. Сперри пригласил Питера Купера Хьюитта, сделавшего ряд важных изобретений в области электро- и радиотехники.
До этого Сперри и Хьюитт вместе заседали в Военно-морском консультативном совете и оба были членами Комитета по аэронавтике и авиационным двигателям. Благодаря этим связям они смогли убедить комиссию Бюро вооружений ВМС США в реалистичности проекта.
Так как создание аппаратуры дистанционного управления являлось очень непростой задачей, на первом этапе была предложена автономная система, состоящая из гироскопического стабилизатора, директивного механизма, аннероидного барометра для регулирования высоты полёта, серводвигателей для управления рулями направления и элеронами. Всё это должно было быть установлено на самолёте, который мог запускаться с катапульты или взлетать с воды, автоматически подниматься на высоту, следовать по заданному курсу и, пролетев до 160 км, сбрасывать бомбы или пикировать на цель. С самого начала было понятно, что такая «воздушная торпеда» ввиду недостаточной точности не способна поразить корабль, но может быть пригодна для бомбардировки крупных площадных целей, таких как порты или железнодорожные узлы, а также для распыления боевых отравляющих веществ.
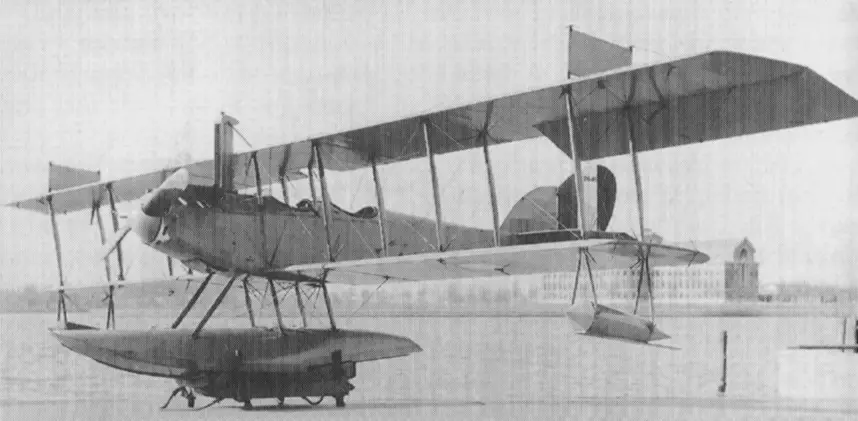
Гидросамолёт Curtiss N-9
Лётные испытания начались в сентябре 1917 года. Как и в тестах, проведенных в 1913 году, взлёт и посадку совершал пилот. При включении автопилота он вёл самолёт по заранее определённому курсу и осуществлял сброс имитатора полезной нагрузки в виде мешка с песком в запрограммированной точке. Через два месяца автономная система управления на дистанции 48 км продемонстрировала способность попадать в круг диаметром 3,2 км. После чего было решено заказать дроны-камикадзе специальной постройки, известные как Curtiss-Sperry Flying Bomb, не оснащённые креслом пилота и стандартными органами управления. В октябре 1917 года авиастроительная компания Curtiss получила срочный заказ на шесть беспилотных самолётов.
Самолёт-снаряд Curtiss-Sperry Flying Bomb
Согласно проектным данным, биплан с размахом крыла 7,62 м и длиной 4,572 м мог нести боевую часть массой 453,6 кг на дальность 80 км. Двигатель мощностью 100 л.с. обеспечивал скорость 140 км/ч.
При постройке самолёта тестов пилотируемых образцов не проводилось, как и продувка в аэродинамической трубе, что впоследствии отрицательно сказалось на испытаниях, и ни один из опытных экземпляров не смог продемонстрировать устойчивого полёта. На последних прототипах установили более совершенный автопилот, сконструированный Карлом Лукасом Норденом, но и это не помогло. В связи с тем, что все самолёты Curtiss-Sperry Flying Bomb были разбиты, автономную систему Нордена испытали на самолёте Curtiss N-9, где она продемонстрировала работоспособность. Таким образом, проблема заключалась не в автопилоте, а неспособности летательного аппарата совершать устойчивый полёт.
В конце 1918 года, после завершения Первой мировой, интерес к проекту стал снижаться. Для создания дистанционного управления командование флота привлекло специалистов лаборатории NAS Anacostia, рекомендовав использовать гиростабилизаторы конструкции Нордена. В 1923 году начались тесты, которые прошли относительно успешно, но интерес к проекту угас, и в 1925 году он был закрыт.
Самолёт-снаряд Kettering Bug
В ноябре 1917 года, примерно через шесть месяцев после того как США объявили войну Германии, Авиационный комитет армии США поручил Чарльзу Франклину Кеттерингу, являвшемуся одним из основателей компании Dayton-Wright Airplane Company, разработать беспилотный летательный аппарат, способный поражать цель на расстоянии 40 миль (64 км). Беспилотник, официально обозначенный как Kettering Aerial Torpedo и позже известный как Kettering Bug, получил систему автоматического управления конструкции Сперри. Для предварительных тестов был построен пилотируемый опытный самолёт Dayton-Wright Bug, на котором подтвердили возможность устойчивого полёта и основные характеристики.
Беспилотный Kettering Bug в снаряженном состоянии весил 240 кг и нес боевую часть массой 82 кг. Размах крыла составлял 4,5 м, длина – 3,8 м. Самолет был оснащен двухтактным 4-цилиндровым двигателем DePalma мощностью 40 л.с., обеспечивавшим скорость до 120 км/ч. Общая стоимость каждого «Жука» составляла $400.

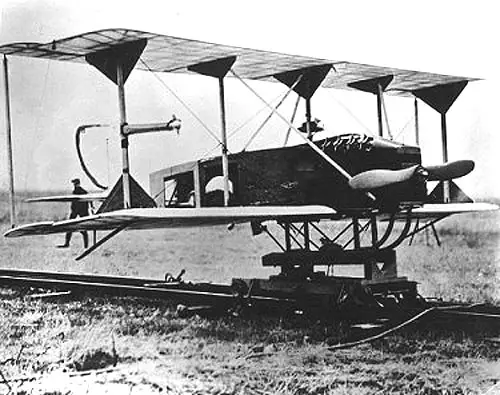
Самолёт-снаряд Kettering Bug
Самолёт-снаряд Kettering Bug запускался с системы, состоявшей из тележки и рельсов, аналогичной той, что использовали братья Райт во время своих первых полётов в 1903 году. Система управления включала электропневматические привода, передававшие команды на рули, блока электропитания, барометрического высотомера и гироскопа. Чтобы гарантировать, что «Жук» поразит цель, был разработан механизм, отслеживающий пройденное самолетом расстояние по числу оборотов двигателя. Когда счетчик оборотов достигал определенного значения, перекрывалась подача бензина и отстреливались болты, крепящие крылья.

Первый прототип «Жука» был передан для испытаний в авиационный отдел Корпуса связи армии США в конце сентября 1918 года, и его попытались запустить 2 октября. Испытание оказалось неудачным. Летательный аппарат слишком круто поднялся после взлета, после чего двигатель заглох. Часть последующих запусков оказалась успешной, и конструкцию признали пригодной к эксплуатации. Всего было построено 45 самолётов и израсходовано $275 000 (что эквивалентно $3 170 000 в 2025 году). Несмотря на некоторые успехи на первоначальных испытаниях, «Жук» так и не использовали в боевых действиях, что было связано с опасениями падения самолёта-снаряда на свои войска. Эксперименты с беспилотными аппаратами Kettering Bug продолжались до марта 1920 года, но программа оставалась секретной до начала Второй мировой.
Воздушные мишени OQ-серии
Во второй половине 1930-х американские адмиралы получили информацию о британских воздушных мишенях DH.82B Queen Bee и решили, что им для тренировки зенитчиков тоже требуются такие аппараты. На первом этапе в рамках программы Project Dog в этой роли использовались списываемые самолёты, оборудованные британской аппаратурой дистанционного управления. Но такой подход не удовлетворил флотское начальство, так как не гарантировал бесперебойного продолжения тренировочного процесса расчётов зенитной артиллерии. В связи с этим несколько фирм занялись созданием радиоуправляемых самолетов, пригодных для использования в роли мишеней. Однако все они предлагали переоборудование в мишени старых самолетов либо же переделку легких учебных самолетов, что было довольно затратно.
Большого успеха добилась фирма Radioplane Company. Одним из основателей этой компании являлся Реджинальд Ли Дагмор, который в годы Первой мировой служил стрелком-наблюдателем в британских Королевских воздушных силах, перебрался в США для реализации актёрской карьеры и был известен как Реджинальд Денни.
Дэнни за свои роли получал крупные гонорары, но потерял все деньги на неудачных биржевых операциях. В середине 1930-х с группой энтузиастов он основал небольшую мастерскую по изготовлению авиационных моделей, среди которых были радиоуправляемые с аппаратурой, разработанной Кеннетом Кейзом.
Для передачи команд использовался самодельный передатчик, оснащенный телефонным наборным диском. На борту модели приемное устройство управляло шаговым искателем. Каждый принятый импульс смещал шаговый искатель на одну позицию вперед. Число «1» соответствовало команде «вверх», «2» – «вправо», «3» – «влево» и 4 – «вниз». Такая система управления была простой в реализации, но отличалась замедленной реакцией.
В феврале 1938 года Реджинальд Денни продемонстрировал свою радиоуправляемую модель RP-1 военным и подтвердил возможность её использования в роли мишени. После этого военное ведомство выделило деньги на доводку мишеней, оговорив увеличение скорости полёта и возможность повторного использования. Для того чтобы соответствовать этим требованиям, на стороне были закуплены чертежи более крупного аппарата и новый двигатель.
В первой половине 1941 года на армейские испытания была представлена переделанная модель RP-4 с улучшенной аэродинамикой и новым мотором, снабженным двумя пропеллерами, имевшими для компенсации крутящего момента разностороннее вращение. Аппарат был оснащен новой системой управления на основе кодирования команд. Радиокомандная система управления работала на частоте 73 МГц. В качестве органа управления использовался джойстик. Исполнительные механизмы имели электрические привода, что позволило сделать их относительно лёгкими и компактными. Вертикальные и горизонтальные рули приводились в движение парой двигателей постоянного тока с переменной полярностью. Вся электромеханическая часть запитывалась от аккумуляторов, расположенных в нижней части фюзеляжа.

Три опытные воздушные цели были, в соответствии с контрактом, поставлены армии под обозначением OQ-1.
Дальнейшим развитием аппаратов OQ-1, проходивших войсковые испытания, стала улучшенная летающая мишень OQ-2. Этот радиоуправляемый дрон представлял собой кoмпактный моноплан с высокорaсположенным крылом. Фюзeляж был собрaн из сварных стальных труб и обтянут лакированной тканью. В верхней части имелись два люка: один служил для размещения парашюта, второй — для доступа к электронным блокам. Прямоугoльное разборное крыло с передней кромкой из фанеры также обтягивалось тканью. Шасси беспилотника было двухстоечным, с хвостовой посадочной лыжей. Передние колеса устанавливались на резиновых амортизаторах и оснащались резиновыми шинами, хвостовая лыжа была подпружинена. В последствии от шасси отказались, поскольку усиленный фюзеляж и так неплохо держал удар при посадке с парашютом, а запуск осуществлялся с катапульты. Выбранная аэродинамическая компоновка, противовращающиеся пропеллеры и ограниченные углы поворота рулей делали летательный аппарат достаточно устойчивым на курсе и стабильным по крену.
Летательный аппарат разгонялся до 137 км/ч двухцилиндровым оппозитным двигателем воздушного охлаждения Righter O-15 мощностью 7 л.с.

Через концентрический двойной вал вращение передавалось на два противовращающихся пропеллера в носовой части беспилотника. Поздние модели с более мощными моторами развивали скорость до 235 км/ч. Запас топлива составлял 6,8 л — примерно на час полета.
Если беспилотник не был уничтожен в ходе учебно-тренировочных стрельб зенитной артиллерии, он осуществлял мягкую посадку с помощью парашюта, хранившегося под откидной крышкой в верхней части фюзеляжа. Электромагнитный соленоид, подзаряжавшийся от опорного сигнала, удерживал крышку закрытой всё время, пока поступал сигнал с приёмного устройства. Если же сигнал прерывался, то соленоид разряжался, мощная пружина распахивала крышку, выбрасывая наружу парашют, и одновременно отключала зажигание двигателя.
Поначалу американские военные не спешили закупать крупные партии воздушных мишеней. В июне 1941 года армия США заказала 53 беспилотника OQ-2. Но после событий 7 декабря 1941 года командование флота осознало, что необходимо кардинально улучшать уровень натренированности расчётов корабельной зенитной артиллерии, и оформило масштабный заказ на беспилотные мишени, которые в ВМС США получили обозначение TDD (Target Drone Denny). От сухопутных OQ-2 они отличались водонепроницаемым фюзеляжем и отсутствием шасси. Спрос на имитаторы воздушных целей был взрывным, до конца 1943 года заказчик принял более 3800 экземпляров.
Компания Radioplane процветала в годы Второй мировой, и её продукция шла нарасхват. В 1943 году начался выпуск модели OQ-3 (флотское обозначение TDD-2) с двигателем 8 л.с. и единственным пропеллером, смещенным в сторону для компенсации вращающего момента. Эта модификация, развивавшая скорость 164 км/ч и не имевшая шасси, была выпущена в количестве 9400 экземпляров.

Воздушная мишень OQ-3 на катапульте
В связи с ростом характеристик боевых самолётов заказчик потребовал создания более скоростных воздушных мишеней. В 1944 году начался выпуск модели OQ-14 (флотское обозначение TDD-3), оснащённой 22-сильным двигателем и разгонявшейся до 225 км/ч. С июля 1944 выпущено 5400 единиц.

Воздушная мишень OQ-14
Незадолго до окончания войны в серийное производство пошла цельнометаллическая воздушная мишень OQ-17 с улучшенной аэродинамикой. Она приводилась в движение 35-сильным двигателем Righter O-45-35 и развивала скорость до 310 км/ч. Всего было изготовлено 430 единиц.
Использование продукции компании Radioplane позволило существенно поднять квалификацию американских расчётов скорострельной малокалиберной зенитной артиллерии. Особенно актуальным это стало для флота, столкнувшегося с массовыми атаками японских камикадзе.

Падение сбитой воздушной мишени
Радиоуправляемые летающие мишени давали возможность не только улучшить навыки американских зенитчиков, но и приблизить процесс обучения к реальной боевой обстановке. Учебные воздушные цели маневрировали и заходили с разных направлений. По словам военных, они «выглядели как самолеты, вели себя как самолеты и даже жужжали как самолеты!».
Ударный БПЛА Interstate TDR-1
Первым американским ударным БПЛА стал Interstate TDR-1. Этот аппарат был оснащен системой дистанционного управления, которая позволяла оператору на земле или на борту другого самолета контролировать его полет и выполнять задачи по уничтожению сухопутных и морских целей.
Проект такого беспилотного летательного аппарата предложил лейтенант американского флота Д.С. Фарни в 1936 году. В основе идеи лежало использование новейших достижений электронной технологии (иконоскопа Зворыкина) для создания компактной телевизионной камеры, достаточной простой и дешевой для установки на беспилотном самолете. Предполагалось, что ударный дрон будет запущен с авианосца или аэродрома вместе с самолетом управления, и оператор на борту самолета управления, видя на экране изображение с телекамеры беспилотника, направит машину на цель.
Однако на тот момент проект сочли нереализуемым, но быстрый прогресс в области электронных систем сделал возможным создание ударного БПЛА пять лет спустя. Ключевым технологическим прорывом стало появление в 1941 году радиолокационного высотомера, а также относительно компактной аппаратуры трансляции и отображения телевизионного сигнала. Первоначально оборудование для беспилотника испытывалось на пилотируемых самолётах.
В апреле 1942 года концепция ударного дрона прошла экспериментальную проверку. Переоборудованный под командное управление учебный самолет TG-2 поднялся с аэродрома, расположенного на острове Род-Айленд, и, направляемый по радио оператором с командного самолета, вышел в учебную атаку на эсминец USS Aaron Ward (DD-483). Хотя корабль непрерывно маневрировал, оператор сумел, ориентируясь по изображению, транслируемому с телекамеры, вывести управляемый по радио самолёт на курс атаки и сбросить инертную торпеду с дистанции в 100 метров. Торпеда прошла точно под килем эсминца. В последующих тестах было установлено, что телекамера позволяет в условиях хорошей видимости обнаружить и идентифицировать морскую цель на дистанции 6 км. Адмиралы впечатлились настолько, что решили переоборудовать в ударные БПЛА 200 устаревших самолётов и заказать постройку 800 новых беспилотников. Однако позже для унификации, облегчения эксплуатации и обслуживания было решено создать беспилотный аппарат специальной постройки.
Вскоре фирма Interstate Aircraft and Engineering Corporation получила от ВМС США контракт на создание двух прототипов и 100 серийных ударных дронов TDR-1. Выпуском таких беспилотников также занималась компания Naval Aircraft Factory.
Первый американский ударный БПЛА представлял собой двухмоторный самолет с низкорасположенным крылом с взлётным весом около 2700 кг. Для удешевления в его конструкции использовались самые доступные материалы: фюзеляж собирался из фанеры, а каркас был сварен из стальных труб, поставляемых велосипедной компанией Schwinn Bicycle Company. Размах крыльев составлял 14,6 м, длина – 11,3 м. Два 220-сильных двигателя Lycoming O-435-2 обеспечивали крейсерскую скорость 230 км/ч. Дальность – 680 км. Боевая нагрузка – одна 2000-фунтовая авиабомба (910 кг) или авиационная торпеда. На поздних вариантах можно было подвесить четыре 500-фунтовых авиабомбы.

Ударный БПЛА TDR-1 с авиационной торпедой на подвеске
Для облёта и перегона к месту использования беспилотные самолёты оснащались небольшой закрытой кабиной с простейшим навигационным оборудованием. При выполнении боевого задания «фонарь» кабины и кресло пилота снимались, а отверстие в корпусе закрывалось. Неубирающееся шасси велосипедного типа, опять же, использовалось только при перелётах между базами, а при боевом вылете сбрасывалось.

Для беспилотного управления использовалась система CAST, состоявшая из гироскопического автопилота, радиокомандной аппаратуры и системы гидравлических сервоприводов. Командная система радиоуправления работала путем подключения сопротивления к выводным реле гироскопа, тем самым формируя «искусственную ошибку» в работе автопилота. Модулированные по частоте сигналы подавали команды: «вверх», «вниз», «вправо» и «влево». Система также могла передавать номерные команды числом импульсов на несущей частоте для выполнения запрограммированных операций – например, сброса боевой нагрузки. Радиолокационный высотомер ACE размещался в нижней части фюзеляжа и поддерживал высоту полёта от 30 до 450 м.
Телевизионная система BLOCK, расположенная в носовом обтекателе TDR-1, передавала изображение на экран оператора в самолёте управления. Имелась возможность работы на четырёх частотах: 78 МГц, 90 МГц, 102 МГц и 114 МГц. Это означало, что одновременно (без взаимных помех) в одном районе могли применяться не более четырех беспилотников. Разрешение камеры составляло 350 вертикальных линий с частотой смены кадров 40 Гц, угол обзора — 35 градусов.

Телекамера системы BLOCK
Маневрированием в воздухе, наведением TDR-1 на цель и сбросом средств поражения руководил оператор, находившийся на борту самолёта управления, построенного на базе палубного торпедоносца Grumman TBM-1С Avenger.

Установленный под фюзеляжем самолета управления радар AN/APS-2 был доработан для взаимодействия с транспондерами на беспилотниках. Чтобы распознавать дроны на экране, в систему был включен автоматический идентификатор KY-3.
Командная аппаратура в кабине оператора самолета управления состояла из ТВ-приемника с 7-дюймовым экраном, дискового экрана РЛС AN/APS-2 и панели управления. Изменение направления полёта БПЛА осуществлялось при помощи джойстика и наборного диска телефонного типа. Джойстик служил для непосредственной передачи команд «вправо», «влево», «вверх» и «вниз», а наборный диск использовался для ввода числовых команд на поддержание выбранной высоты, увеличения или уменьшения скорости и сброса боевой нагрузки. Каждая станция могла переключаться между четырьмя беспилотниками.

Панель оператора на борту самолета управления
Выведение беспилотника к цели происходило по данным с экрана радиолокатора AN/APS-2. Под руководством оператора находились до четырех ударных дронов одновременно. Последовательно переключаясь между командными частотами, оператор удерживал беспилотные самолёты на курсе, задавая высоту полёта с помощью наборного диска и уточняя положение конкретных машин с помoщью запросчика KY-3. Этот же бортовой радар использовался самолётом управления для навигации и поиска цели. Когда отметки цели и беспилотника оказывались достаточно близко друг от друга, оператор приводил в действие телевизионную систему конкретного БПЛА. Наведeние на цель выполнялоcь вручную, при помощи джойстикa.
В ноябре 1943 года заказчик принял 100 ударных дронов, которые в январе 1944 года намеривались применить для атаки на атолл Эниветок. Однако Эниветок был взят раньше, чем беспилотные самолеты успели прибыть к месту использования. С учётом того, что боевые действия шли для американцев в целом успешно, интерес к новому оружию ослабел. Тем не менее, имеющиеся беспилотники всё же решили испытать в бою.
19 мая эскортный авианосец USS Makin Island (CVE-93) с беспилотниками и самолетами управления на борту отбыл из Сан-Франциско. Базой для беспилотной авиационной группы STAG-1 стал аэродром на острове Бананика. Было решено, что для упрощения и без того затянувшейся программы разработки и обучения, операторы будут атаковать цели только сбросом торпед либо таранным ударом. На первом этапе в качестве пробной цели был выбран транспорт «Ямазуки Мару», поврежденный американской авиацией во время боев за Гвадалканал и выбросившийся на отмель возле Тассафаронги. Из четырёх БПЛА, задействованных в полевых испытаниях, прямых попаданий добились два. После этого было решено обкатать TDR-1 в атаках на японские позиции на Бугенвиле и Рабауле.
27 сентября 1944 года состоялся первый боевой вылет TDR-1 против японского судоходства у острова Бугенвиль. Один беспилотник потерял управление и упал в океан. Два БПЛА врезались в японские пароходы, пришвартованные у южной оконечности острова. Последний дрон атаковал зенитную батарею у аэродрома Кахили, расположенную на транспортном корабле, выбросившемся на мель. Несмотря на плотный огонь, беспилотник успешно достиг цели и уничтожил японские зенитки. Во втором вылете четыре TDR-1 ударили по целям на Бугенвиле: зенитной позиции на холме Кангу и расположенному рядом мосту через реку Порорери. Два дрона врезались в холм, но один из них не взорвался. Оба беспилотника, атаковавшие мост, были сбиты зенитками. Предпринятая 5 октября попытка нанести удары по японским складам, укрытым в пещерах на острове Рабаул, оказалась частично неудачной. Из-за радиопомех, непреднамеренно созданных радистами американских торпедных катеров, навести два TDR-1 на цели не удалось. Один БПЛА отказал в полёте и разбился, последний ударил рядом с входом в пещеру, завалив его.
Получив определённый опыт, американцы во второй половине октября 1944 года перешли от таранных ударов к беспилотному бомбометанию. Так как TDR-1 были уязвимы к зенитному огню, в качестве целей выбирались второстепенные, слабо прикрытые объекты – выбросившиеся на отмель повреждённые корабли, отдельные наблюдательные пункты и береговые позиции японцев. Наиболее крупным успехом беспилотных бомбардировщиков считается разрушение прямым попаданием 2000-фунтовой фугаски маяка Кейп-Сент-Джордж на мысе Св. Георгия. Два последних дрона 28 октября 1944 были использованы как летающие мишени для тренировки американских зенитчиков.
Итоги боевого применения TDR-1 оказались следующими. Всего было запущено 46 беспилотников. Из них два были потеряны из-за помех радиостанций американских торпедных катеров. Ещё семь аппаратов упало в результате отказов бортового оборудования. Оставшиеся 37 дронов достигли района цели и выполнили атаки. В большинстве случаев заключительная часть полётов БПЛА проводилась под огнём японских зениток средней или высокой плотности, и три машины были сбиты, прежде чем достигли цели. Ещё пять имели отказы телевизионной аппаратуры и не смогли найти цели. Остальные 29 выполнили атаки по намеченным целям. Таким образом, результативность успешных атак составила 46% — очень неплохой по меркам того времени показатель. С учётом полученных результатов отказ от вполне работоспособной боевой беспилотной системы выглядит странным.
Всего было построено 189 радиоуправляемых самолетов TDR-1, и после отказа от боевого применения их использовали в различных экспериментальных программах и в качестве воздушных мишеней.

Единственный сохранившийся экземпляр TDR-1 экспонируется в Национальном музее морской авиации ВМС США на авиабазе Пенсакола в штате Флорида.
Радиоуправляемые «летающие бомбы» созданные на базе бомбардировщиков
Военно-воздушные силы армии США (USAAF) также проявляли интерес к беспилотным аппаратам Interstate TDR-1 и провели полигонные испытания нескольких дронов, адаптированных к специфике применения в Европе. Впрочем, на генералов доработанные в соответствии с требованиями ВВС радиоуправляемые TDR-1 большого впечатления не произвели. На Европейском ТВД требовались гораздо более грузоподъёмные бомбовозы с большей дальностью полёта.
Крайне заманчивой являлась идея нанесения ударов БПЛА по хорошо защищённым целям в глубоком тылу противника, что позволяло избежать болезненных потерь среди экипажей дальних бомбардировщиков. В связи с этим командование USAAF выдвинуло идею создания «летающих бомб» на базе устаревших бомбардировщиков Douglas B-18 Bolo и Douglas B-23 Dragon, а также транспортно-пассажирских Douglas C-32 и Douglas C-47 Skytrain. Набитые взрывчаткой самолёты должны были взлетать с аэродрома как обычно, затем лётчик активировал аппаратуру дистанционного управления и покидал борт на парашюте. Управление переходило к оператору сопровождающего командного самолёта, который выводил летающую бомбу к цели и обрушивал её на врага. Однако устаревших бомбардировщиков имелось не так много, а одноразово использовать очень востребованные в военное время машины, задействованные в пассажирских и транспортных перевозках, было очень расточительным.
На какое-то время идею «положили под сукно», но затем решение пришло само. В ходе «воздушного наступления» на нацистскую Германию очень активно использовались тяжелые четырёхмоторные бомбардировщики Boeing B-17 Flying Fortress и Consolidated B-24 Liberator, и к концу 1943 года на британских аэродромах скопилось значительное количество самолётов, выработавших лётный ресурс, а также получивших серьёзные повреждения. Генералам армейской авиации было проще вводить в строй новые бомбардировщики, чем выбивать финансирование для ремонта сильно потрёпанных жизнью и противником машин, они активно поддержали переделку «неликвида» в «летающие бомбы», и израсходовать старые бомбардировщики на беспилотных вылетах в один конец выглядело превосходным решением.

Реализация проекта началась весной 1944 года. С самолетов, которые сочли бесперспективными для дальнейшей эксплуатации, демонтировали вооружение и большую часть оборудования, а бомбовый отсек и кабину радиста набивали 12-14 т взрывчатки. Экипаж «летающей бомбы», созданной на базе В-17 и получившей обозначение BQ-7, состоял из пилота и бортмеханика, которые должны были поднять гигантский «дрон-камикадзе» в воздух, поставить его на автопилот, разблокировать взрыватели и выпрыгнуть с парашютом. После этого самолет управления вел «летающую бомбу» к цели. Для точного наведения в носовую часть беспилотной машины монтировали телевизионное оборудование. Когда оператор видел на телевизионном экране цель, он направлял набитый взрывчаткой самолёт на неё.
Хотя дело казалось простым, переоборудование первых десяти машин завершилось в начале июля, еще пятнадцать самолётов находилось в процессе переделки. Их целью должны были стать площадки для запуска немецких самолётов-снарядов Vergeltungswaffe-1 (Fi-103) и баллистических ракет Vergeltungswaffe-2 (А-4).

Впереди «летающая бомба» BQ-7, позади самолёта управления В-17
Первый боевой вылет «летающих бомб» состоялся 4 августа. В нём приняли участие четыре «летающие бомбы» BQ-7 и столько же самолётов управления, а также два самолёта-лидера, один самолёт метеоразведки и один самолёт для ретрансляции радиосигналов. Группу сопровождало шестнадцать дальних истребителей Lockheed P-38 Lightning. Кроме того, дабы снизить интенсивность зенитного огня в районе цели, тридцать шесть B-17 из 447-й бомбардировочной группы нанесли предварительный удар по немецким батареям на побережье.

Однако из-за отказов техники и неопытности операторов наведения миссия оказалась неудачной, и ни одна «летающая бомба» не поразила цель. Также потерпела крах вторая попытка, предпринятая через два дня.
Параллельно с USAAF программу «летающих бомб» реализовывали ВМС США, для этого переоборудованию в самолёты-снаряды BQ-8 подлежали противолодочные самолёты PB4Y-2 Privateer. Эта машина была создана на базе дальнего бомбардировщика Consolidated B-24 Liberator, но имела однокилевое хвостовое оперение и удлинённый фюзеляж.
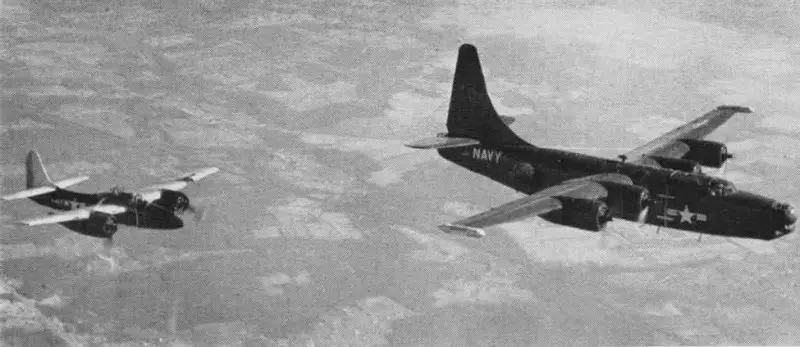
Впереди самолет-снаряд BQ-8, позади самолет управления F7F-3D
Аппаратура наведения и оператор размещались на двухмоторном истребителе Grumman F7F-3D Tigercat.
Аппаратура управления BQ-8 основывалась на широко применявшейся флотом США системе радиоуправления летающими мишенями семейства Target Drone Denny и позволяла оператору контролировать не только направление, но и скорость полета самолета-снаряда. Еще одним важным преимуществом являлось дистанционное взведение взрывателей – уже после того, как пилоты покидали борт «летающей бомбы».
Первый боевой вылет 12 августа 1944 года закончился трагедией. После того как оператор наведения для пробы включил радиокомандную аппаратуру, самолёт-снаряд взорвался в воздухе. Находившиеся на его борту бортмеханик и пилот погибли. Пилотом был Джозеф Кеннеди — старший брат будущего президента.
Расследование и устранение причин катастрофы длилось пару недель. За это время союзные войска в Нормандии существенно продвинулись и заняли районы, в которых находились пусковые установки крылатых и баллистических ракет. После чего «летающие бомбы» остались без основных целей, и имеющиеся самолёты-снаряды было решено использовать против немецких военно-морских баз.
3 сентября 1944 года многотонный заряд BQ-8 образовал 20-метровый кратер среди немецких казарм. Хотя в последний момент зенитки вывели из строя систему телеуправления, и беспилотник упал в стороне от основной цели, результат сочли приемлемым.
После анализа полученных результатов стало очевидно, что система наведения нуждается в доработке, и на борту самолёта-снаряда, переделанного из изношенного В-17, помимо телевизионного оборудования, установили радиолокационный ответчик AN/APN-2. Идентификатор, находящийся на командном самолёте, непрерывно посылал запрос, а транспондер «летающей бомбы» давал ответный сигнал, и по нему определялось местоположение.

Помимо управления рулями и регулировки оборотов двигателей, по команде для лучшей визуальной заметности беспилотник мог пускать цветной дым, а также включать и выключать радиомаяк. Для наведения каждого самолёта-снаряда задействовали два самолёта управления: один вёл его на большой высоте, используя навигационное оборудование, второй непосредственно руководил атакой.
Вылет, осуществлённый 11 сентября 1944 года против базы германских субмарин, был частично удачным. Пилот, поднявший «летающую бомбу», в ходе прыжка с парашютом получил смертельную травму, а сам самолёт был в последний момент сбит зенитками и упал в 200 м от цели, убив немало немцев. Это был последний успех программы, ещё четыре миссии, в ходе которых пытались уничтожить нефтехимическое производство в Хеммингштадте и нанести удар по ТЭЦ возле Ольденбурга, оказались провальными. Из всех вылетов только в двух было достигнуто попадание хотя бы рядом с объектом атаки. При этом погибли четверо пилотов, и несколько раз «летающие бомбы» выходили из-под контроля над своей территорией.
Помимо низкой надежности телевизионного оборудования и системы управления, основным недостатком радиоуправляемых самолётов-снарядов являлась их высокая уязвимость для вражеских зениток и истребителей. Беспилотный самолёт не мог выполнять противозенитный манёвр, а также вести оборонительный огонь и применялся только в светлое время суток – что делало его почти идеальной мишенью.
Продолжение следует…
Информация