Старая схема, новая эпоха: чего ждать от X-BAT

В июле 1957 года лётчик-испытатель Питер Жирар выбирался из кабины Ryan X-13 Vertijet по верёвочной лесенке. Машина висела хвостом вниз на стальной мачте, зацепленная крюком за горизонтальный трос, как насекомое, прилипшее к стене. Через год программу закрыли: пилот не мог нормально посадить реактивный истребитель на хвост, выворачивая шею через плечо. Ещё через 67 лет калифорнийская Shield AI показала X-BAT, реактивный аппарат ровно той же схемы. Только без человека в кабине, и потому, как утверждают разработчики, на этот раз должно получиться.
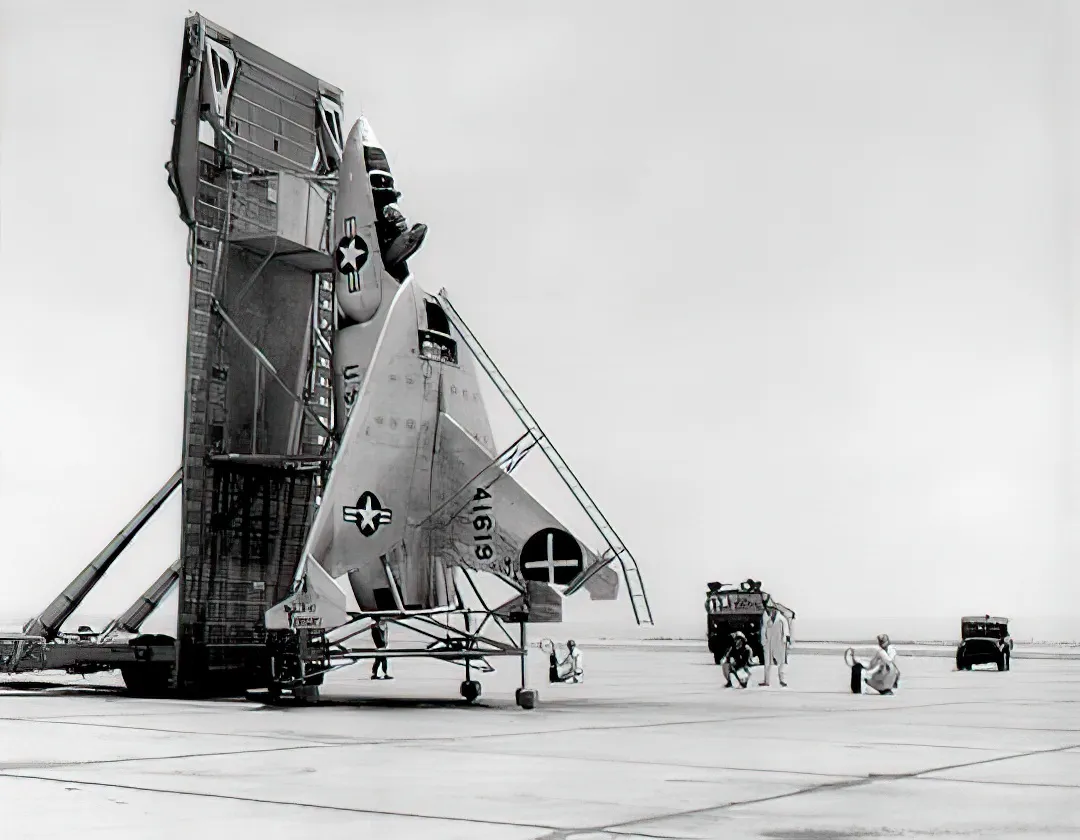
Ryan X-13 Vertijet (#54-1619) с хвостовым оперением, 1955 год
Pogo, Salmon и Vertijet: как ВМС США пытались посадить истребитель на хвост
В 1951 году ВМС США объявили конкурс на истребитель, способный взлетать вертикально с маленьких кораблей сопровождения, у которых не было и не предполагалось полётной палубы. Идея простая: машина стоит на четырёх хвостовых килях, разгоняет винты, отрывается от палубы, в воздухе ложится на брюхо и дальше летит как обычный самолёт. На посадке наоборот: задирает нос, гасит скорость и медленно опускается на хвост.
К 1954 году в воздух поднялись две конкурирующие машины. Convair XFY-1 Pogo с турбовинтовым Allison T40 мощностью около 5500 л. с. и соосными винтами успел совершить полный цикл: вертикальный взлёт, переход в горизонтальный полёт и обратно. Lockheed XFV-1 Salmon с тем же двигателем летал только горизонтально, с временным колёсным шасси: вертикально подняться так и не решились.
Через год к программе подключилась фирма Ryan со своим X-13 Vertijet. Это уже был чистый реактивный tailsitter. Двигатель Rolls-Royce Avon, тяга около 4500 кгс, посадка не на хвостовые подпорки, а на специальную мачту-тележку: машина зацеплялась крюком за горизонтальный трос. 30 июля 1957 года Vertijet эффектно сел на этой мачте перед зданием Пентагона, и газеты были в восторге.

Второй прототип Ryan X-13 Vertijet
Восторг кончился быстро. Пилот в кресле «полулёжа на спине» не видел точки посадки: он смотрел вверх, а садиться надо было вниз. Высоту над платформой определял на глаз, по подсказкам наземного оператора, который жестами показывал «ниже–левее». Небольшая ошибка по высоте, и крюк проходил мимо троса. К 1958 году тему свернули, все три проекта. Диагноз был не аэродинамический: схема в принципе летала. Просто человеку в ней нечего было делать.
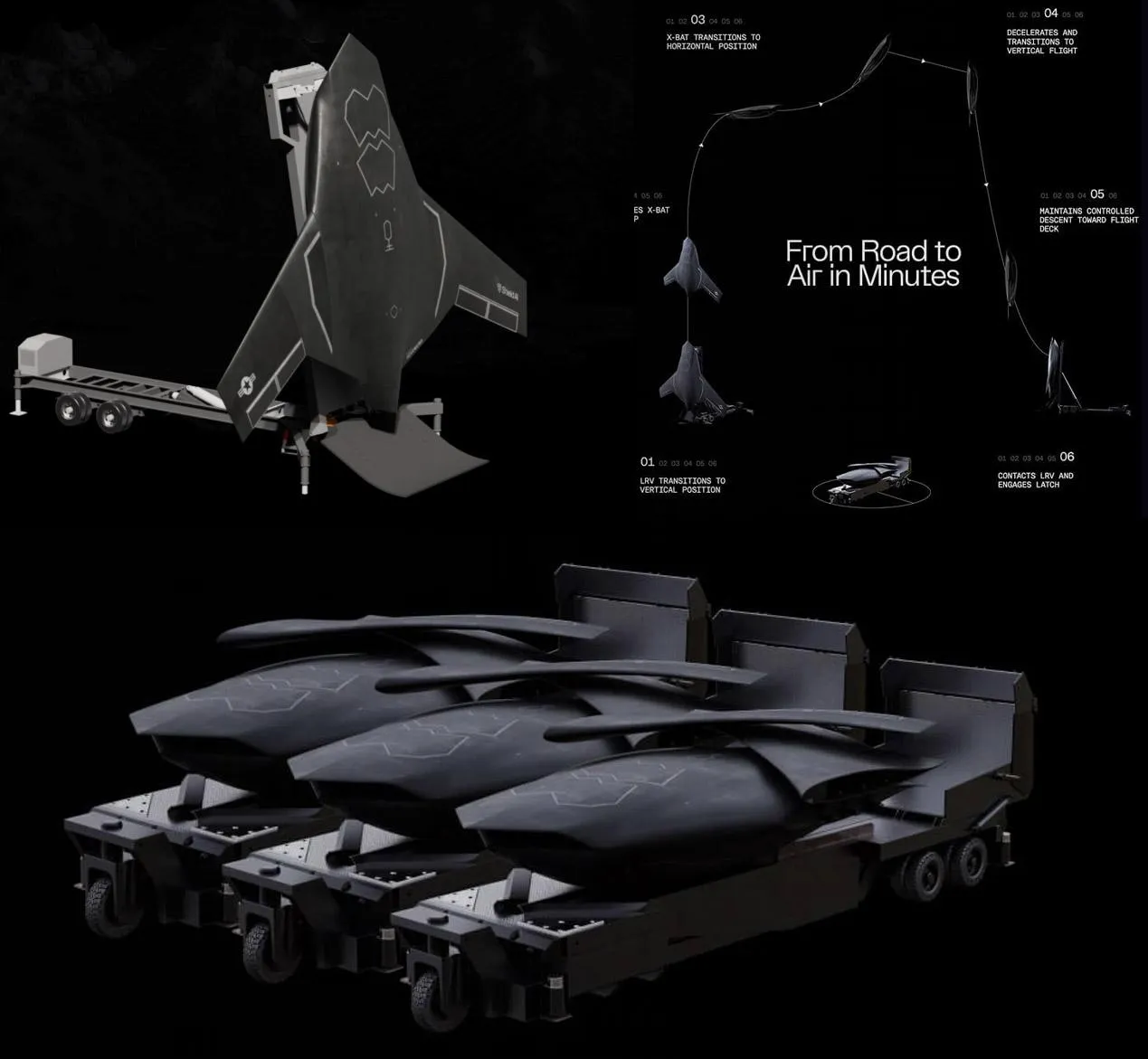
X-BAT: тот же силуэт, другая эпоха
Весной 2026 года Shield AI опубликовала первые открытые данные по X-BAT. Первый вертикальный полёт обещан на конец 2026 года, заявленная боеготовность — 2029-й. Цифры сроков — пока корпоративные обещания, не контрактные обязательства, и относиться к ним стоит соответственно.

По данным Shield AI, машина имеет длину 7,9 м, размах 11,9 м, высоту на хвосте около 1,4 м. На месте, которое в ангаре занимает один F-35, помещаются три X-BAT, и это главная цифра, ради которой всё затеяно. Шасси нет: запуск и приём — с мобильной платформы, по сути потомка той самой мачты Vertijet, только теперь с автоматикой и гидравликой вместо наземного оператора с флажками.
Двигатель — General Electric F110, тот самый, что стоит на поздних F-16 и F-15. Выбор объяснимый: миллионы часов наработки, понятная логистика, по данным GE Aerospace на 2024 год около 3400 двигателей этого семейства в эксплуатации по миру. На сопле — AVEN (Axisymmetric Vectoring Exhaust Nozzle) с управляемым вектором тяги. Технология не новая: AVEN в 1990-х отрабатывали на опытных F-16 в рамках программы F-16 MATV (Multi-Axis Thrust Vectoring) и параллельных испытаний на исследовательском борту F-16 VISTA. Тогда она искала себе применение и толком не нашла. Теперь нашла: именно вектор тяги делает возможной точную посадку реактивной машины хвостом вниз. Vertijet'у этого не хватало физически.
Здесь же ответ на естественный вопрос «почему не подъёмный вентилятор, как на F-35B». Подъёмный вентилятор и поворотные сопла Harrier — это сотни килограммов и кубометры объёма, навсегда вычтенные из боевой нагрузки и топлива. Tailsitter использует маршевый двигатель и для взлёта, и для маршевого полёта; отдельной подъёмной системы у него нет вовсе. Ценой становится посадка хвостом на платформу, но именно её и берёт на себя автоматика.
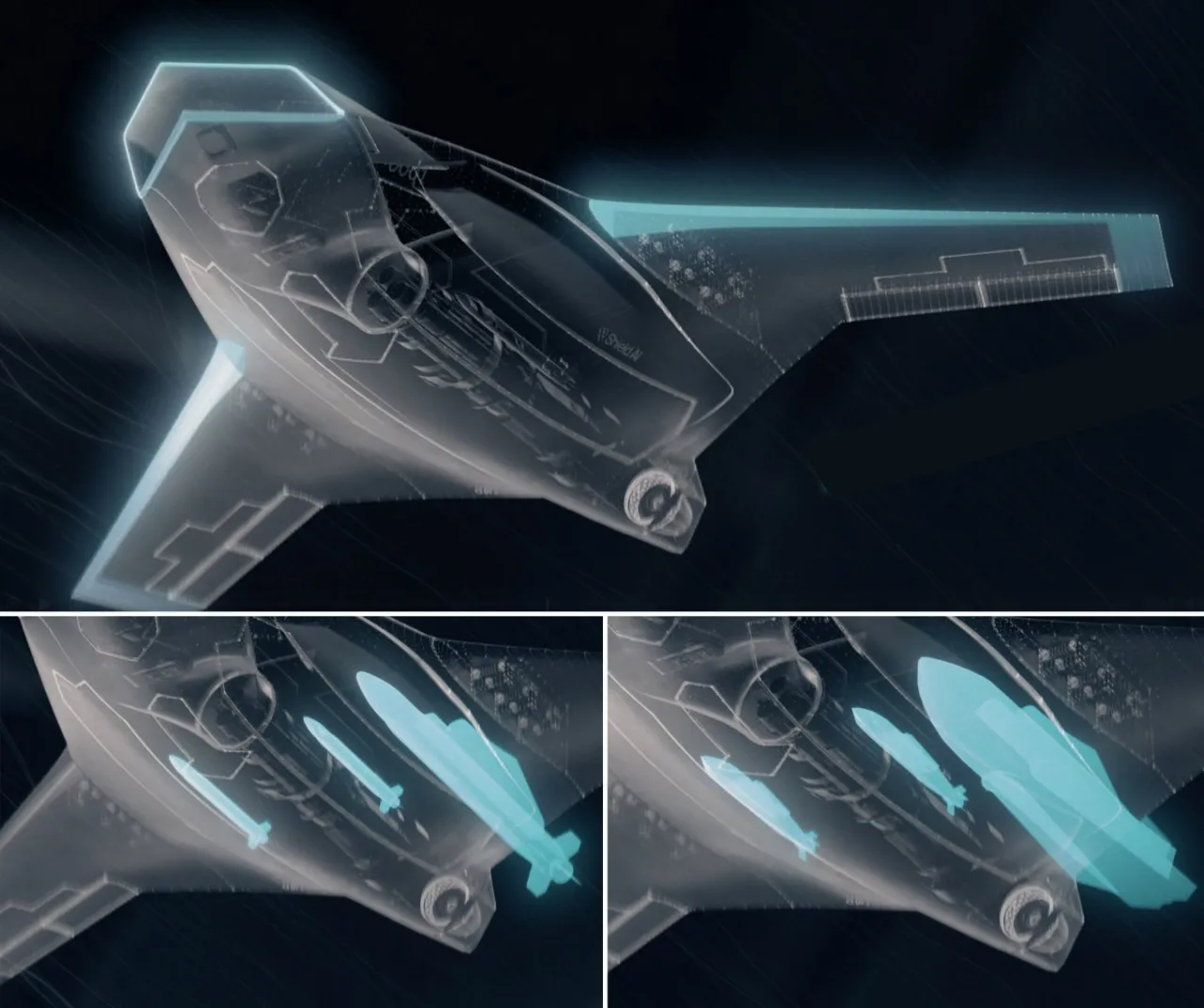
Внутренний отсек вооружения, по тем же данным Shield AI, сопоставим с отсеком F-35: четыре ракеты AIM-120 AMRAAM либо около 900 кг другой нагрузки в скрытной конфигурации. На внешних узлах ещё столько же, но уже без претензий на малую заметность. Заявленная дальность — более 2000 морских миль, около 3700 км; потолок — 50 000 футов, примерно 15 км. Цифры уверенные, но проверить их пока не на чем: машина в воздух не поднималась.
Hivemind: что на самом деле значит «без пилота»
Вторая половина истории — софт. Система автономии Shield AI называется Hivemind и появилась задолго до X-BAT. Её обкатывали на лёгком разведчике V-BAT, который, по сообщениям Defense News и по подтверждению самой Shield AI, с 2023 года работает на Украине, в том числе там, где GPS глушится постоянно, а связь идёт по остаточному принципу.
Принцип Hivemind отличается от обычного автопилота. Машина не идёт по заранее загруженному маршруту, а перепланирует его в полёте, по бортовым датчикам, без подсказок снаружи. Решение на применение оружия, по заявлению компании, остаётся за человеком; всё остальное — навигация, обход угроз, выбор момента для манёвра — делается на борту. Если связь с оператором пропала, машина не разворачивается домой, а продолжает работу по последнему набору правил.

Здесь и проходит главное отличие от Vertijet. Tailsitter сложен не в полёте: в полёте он ведёт себя как обычный самолёт. Он сложен в посадке: нужно одновременно гасить скорость, держать вертикаль, контролировать снос и видеть точку приёма. Человеку для этого не хватало шеи и глаз. Алгоритму нужны инерциальный блок, оптика и точное позиционирование по визуальным маркерам платформы; всё это в 2026 году стоит копейки по меркам авиапрома.
Скептики у проекта есть, и серьёзные. Аналитик британского RUSI Джастин Бронк (Justin Bronk) в своих публикациях по программам беспилотных «ведомых» неоднократно указывал, что массовая дешёвая автономия и устойчивость к радиоэлектронному подавлению обычно конфликтуют по цене: либо одно, либо другое. Есть и более узкая претензия: посадка реактивного tailsitter'а при сильном боковом ветре остаётся нерешённой задачей и для алгоритма. Эксперименты DARPA с малыми tailsitter-БПЛА упирались именно в это: при определённых углах и скоростях ветра у платформы вертикали попросту нет. Мореходные испытания на палубе в Тихом океане в 2027–2028 годах покажут, насколько эта проблема снята или не снята.
Куда это встаёт: место X-BAT в семье беспилотных «ведомых»
X-BAT появляется не в пустом поле. ВВС США уже выбрали для программы Collaborative Combat Aircraft (CCA) две машины: YFQ-42A от General Atomics и YFQ-44A от Anduril. Обе классической самолётной схемы, обе требуют полосы. XQ-58A Valkyrie от Kratos туда же: взлетает с ракетным ускорителем, садится на парашюте. Полосы у всех разные, но полоса нужна.
X-BAT в CCA не выбирали. Это инициативная разработка Shield AI, а не контракт Пентагона — деталь, которую в пресс-релизах обходят, но из песни не выкинешь. Компания пробивает себе нишу через единственный аргумент, которого у конкурентов нет: вертикальный взлёт. По заявлениям руководства Shield AI в открытых интервью, цена машины — 20–30 миллионов долларов, план серии — 150 штук в год при работе в одну смену. Оба числа — со слов разработчика, без подтверждения извне. История американского авиапрома последних тридцати лет учит относиться к таким цифрам с поправочным коэффициентом.
При этом задача, которую решает X-BAT, не нова. В 1951 году ВМС США хотели реактивный истребитель для маленьких кораблей без полётной палубы и не получили его. В 2026 году Shield AI предлагает реактивный ударный аппарат для универсальных десантных кораблей, малых платформ и грунтовых площадок, то есть ровно для тех носителей, у которых полосы нет и не предполагается. Постановка задачи не изменилась за 70 лет. Изменились двигатель с управляемым вектором тяги, бортовая электроника и, главное, отсутствие в кабине того, кому надо смотреть через плечо.
Что из этого получится на практике, станет видно к концу 2026 года, когда X-BAT впервые попробуют поднять и посадить вертикально. Если получится, авиапром получит первый со времён Vertijet работающий ответ на старый вопрос про корабли без полётной палубы. Если нет, тема ляжет в архив ещё лет на тридцать, потому что следующего захода в эту же дверь придётся ждать нового поколения автономии.
Информация