Экспериментальный шагоход «Ортоног»
Самоходная техника с шагающим движителем давно привлекает ученых, инженеров и потенциальных пользователей. Имеющиеся исследования наглядно показывают преимущества шагоходов перед колесной или гусеничной техникой на нескольких типах поверхности. При этом до сих пор ни один из проектов шагающей техники не вышел из стадии испытания прототипов. Ценой высоких ходовых качеств оказывается большая сложность конструкции и необходимых систем управления, способных контролировать состояние поверхности, работу агрегатов и т.п. Несколько дней назад состоялась демонстрация очередного образца шагохода, призванного решить некоторые из имеющихся проблем.

В ходе V Международной научно-практической конференции «Прогресс транспортных средств и систем-2013», недавно прошедшей в Волгоградском государственном техническом университете (ВолГТУ), участникам мероприятия из 37 стран показали экспериментальный аппарат «Ортоног». Разработанная сотрудниками кафедры «Теоретическая механика» ВолГТУ и ЦКБ «Титан» шагающая машина предназначена для отработки систем управления и демонстрации возможностей шагохода с оригинальным ортогональным движителем. Стоит отметить, волгоградский «Ортоног» впервые пошел еще год назад, но на результате тех испытаний сказалось несовершенство системы управления. За прошедшее время разработчики проекта усовершенствовали алгоритмы, по которым работают агрегаты машины, что привело к заметному повышению ее характеристик. Во время демонстрации в рамках конференции «Ортоног» свободно ходил по демонстрационной площадке, получая команды с пульта управления.
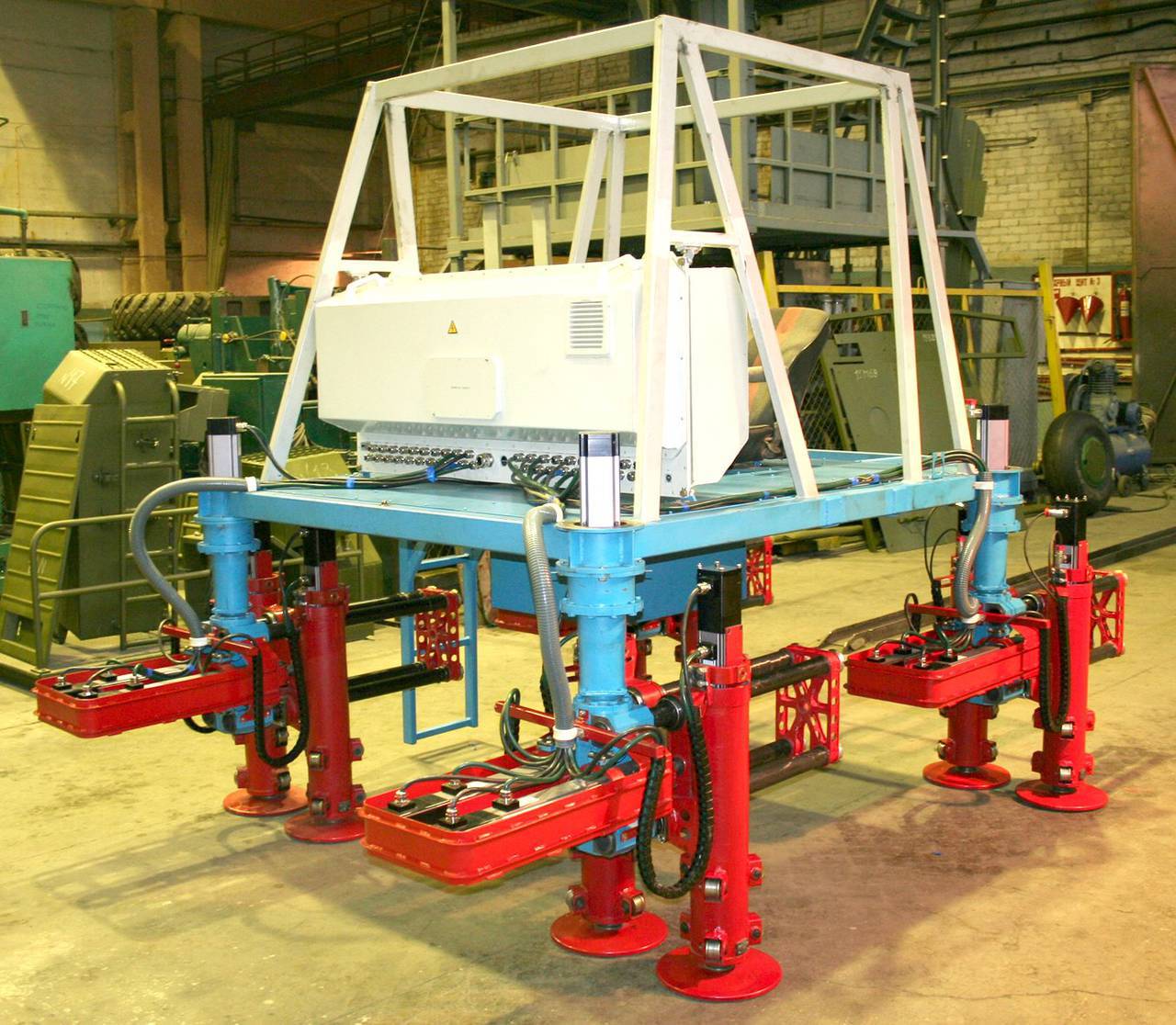
Конструкция экспериментальной машины «Ортоног» сравнительно проста, но при этом эффективна. На раме аппарата установлена кабина с рабочим местом оператора-водителя и системами управления. За нею смонтирован малогабаритный бензиновый генератор, снабжающий шагоход электроэнергией, необходимой для его работы. В нижней части рамы закреплены четыре блока ортогональных шагающих движителей. Прототип машины «Ортоног» покрашен в цвета российского флага, что, кроме прочего, облегчает визуальное определение различных агрегатов. Так, элементы кабины окрашены в белый цвет, рама в синий, а ходовая часть – в красный. Экспериментальная машина весом около 1200 кг имеет полную длину порядка 3,3 метра, ширину не более 2,2 м и высоту 2,75 м.
Каждый из четырех блоков ходовой части условно разделен на три элемента: механизмы вертикальных перемещений, механизмы горизонтальных перемещений и механизмы поворота. Первые имеют в своем составе электроцилиндры и отвечают за подъем и опускание круглых опор, размещенных на выдвижных штоках. «Ортоног» имеет восемь таких опор, по две на каждый блок ходовой части. Механизмы горизонтальных перемещений, состоящие из направляющих и приводов, предназначаются для передвижения цилиндра и штока с опорой. В составе каждого блока ходовой части имеется по два комплекта направляющих и приводов, по одному на каждый цилиндр с опорой. Наконец, механизмы поворота разворачивают весь блок ходовой части вокруг вертикальной оси. Вся ходовая часть экспериментальной машины построена на основе электрических приводов.
Движение шагохода «Ортоног» по ровной поверхности выглядит следующим образом. Машина поднимает четыре опоры из восьми (по одной от каждого блока ходовой части) и сдвигает их вперед при помощи механизмов горизонтальных перемещений. Далее опора опускается на поверхность и цикл повторяется, но на этот раз поднимаются и перемещаются вперед другие четыре опоры. Во время перемещения «Ортоног» попеременно использует приводы вертикальных перемещений, а механизмы горизонтальных работают почти все время. При необходимости в действие приводятся механизмы поворота. Синхронная или раздельная их работа обеспечивает поворот на необходимый угол. Как видно из конструкции, экспериментальный шагоход может совершать повороты с минимальным радиусом.
Все механизмы ходовой части оснащены датчиками, собирающими информацию об их работе. Сведения передаются на пульт оператора-водителя и он имеет возможность вносить коррективы в работу машины. Именно с работой водителя связан один из самых больших вопросов в рамках проекта «Ортоног». Как показывает практика, человек может эффективно управлять машиной лишь при движении по ровной поверхности. Если же возникает необходимость в движении по пересеченной местности и т.п. сложным маршрутам, то оператор не может самостоятельно уследить за работой всех механизмов и подобрать нужные в тот или иной момент алгоритмы работы. В связи с этим одновременно с технической частью машины разрабатывался автоматизированный комплекс управления.
Изначально на испытаниях экспериментальной машины использовался следующий метод управления. Оператор комплекса контролировал автономную работу аппарата по информации, передаваемой видеосистемой. При необходимости, в первую очередь, при преодолении препятствий, он вмешивался и вносил необходимые коррективы в работу шагохода. Подавляющее большинство действий по управлению машиной производилось автоматикой без участия человека. При этом автоматика экспериментального аппарата получала информацию о работе систем и положении машины в пространстве только с датчиков. Никакие меры по использованию видеосигнала не принимались. Результатом такого подхода к сбору информации, необходимой для управления машиной, стала ситуация, при которой электроника не может самостоятельно обходить препятствия и для этого необходимо вмешательство оператора.

Такие испытания помогли собрать сведения, необходимые для настройки адаптивного управления шагоходом. Специальная аппаратура фиксировала все действия оператора, информацию с датчиков, а также записывала сигнал внешних и встроенных видеокамер. В дальнейшем все записанные данные были сопоставлены и выделены те фрагменты данных, которые соответствовали определенным действиям механизмов. Эти сведения использовались для «обучения» автоматики. Результаты испытаний и доводки систем управления на первый взгляд кажутся не слишком высокими. Тем не менее, уже в конце прошлого года аппарат «Ортоног» умел самостоятельно и без помощи оператора двигаться по прямым и наклонным поверхностям и удерживать необходимое положение корпуса независимо от угла наклона поверхности. Кроме того, аппарат «научился» самостоятельно останавливаться, наткнувшись на препятствие, и определять размеры помехи при помощи имеющихся механизмов ходовой части.
Несмотря на то, что аппарат «Ортоног» пока не может стать основой для шагающих машин, пригодных к практическому применению, уже сейчас видны его перспективы. Как следует из имеющихся сведений о ходе работ по этому проекту, сотрудникам ВолГТУ и ЦКБ «Титан» удалось разработать эффективный шагающий движитель и создать алгоритмы управления им, имеющие хорошие перспективы. По официальным данным, машина «Ортоног» может разгоняться до скорости свыше 1,6 километра в час. Длина и высота шага опоры в 45 см позволяет аппарату преодолевать препятствия высотой до 40-45 см, сохраняя горизонтальное положение рамы. При более сложных маневрах, подразумевающих наклон аппарата, максимальная высота препятствия увеличивается до 80 см. Максимальная ширина пересекаемого рва – 0,9 метра. Шагающий движитель способен преодолевать подъемы до 40°. При движении поперек склона «Ортоног» сохраняет устойчивость при угле наклона поверхности до 60°. Поворотные блоки ходовой части позволяют аппарату менять направление движения на любой угол относительно его продольной оси. При необходимости возможно движение боком и разворот с радиусом чуть более одного метра.
О перспективах проекта «Ортоног» пока говорить рано. Этот проект и построенный в соответствии с ним аппарат носят исключительно экспериментальный характер, что полностью определяет дальнейшие планы организаций-разработчиков. В ближайшем будущем кафедра «Теоретическая механика» ВолГТУ и ЦКБ «Титан» продолжат развитие шагающего движителя и систем управления для него. Только после создания полноценных алгоритмов, способных обеспечивать работу шагохода на различных поверхностях и в различной обстановке возможно начало работ над следующим экспериментальным образцом. Следующий проект может быть использован для совершенствования имеющихся наработок и их адаптации к практическому применению. Вряд ли новый проект появится в течение ближайшего времени: на завершение работ над аппаратом «Ортоног», возможно, потребуется затратить несколько лет.

По материалам сайтов:
http://cdbtitan.ru/
http://dtm.vstu.ru/
http://vpk.name/

В ходе V Международной научно-практической конференции «Прогресс транспортных средств и систем-2013», недавно прошедшей в Волгоградском государственном техническом университете (ВолГТУ), участникам мероприятия из 37 стран показали экспериментальный аппарат «Ортоног». Разработанная сотрудниками кафедры «Теоретическая механика» ВолГТУ и ЦКБ «Титан» шагающая машина предназначена для отработки систем управления и демонстрации возможностей шагохода с оригинальным ортогональным движителем. Стоит отметить, волгоградский «Ортоног» впервые пошел еще год назад, но на результате тех испытаний сказалось несовершенство системы управления. За прошедшее время разработчики проекта усовершенствовали алгоритмы, по которым работают агрегаты машины, что привело к заметному повышению ее характеристик. Во время демонстрации в рамках конференции «Ортоног» свободно ходил по демонстрационной площадке, получая команды с пульта управления.
Конструкция экспериментальной машины «Ортоног» сравнительно проста, но при этом эффективна. На раме аппарата установлена кабина с рабочим местом оператора-водителя и системами управления. За нею смонтирован малогабаритный бензиновый генератор, снабжающий шагоход электроэнергией, необходимой для его работы. В нижней части рамы закреплены четыре блока ортогональных шагающих движителей. Прототип машины «Ортоног» покрашен в цвета российского флага, что, кроме прочего, облегчает визуальное определение различных агрегатов. Так, элементы кабины окрашены в белый цвет, рама в синий, а ходовая часть – в красный. Экспериментальная машина весом около 1200 кг имеет полную длину порядка 3,3 метра, ширину не более 2,2 м и высоту 2,75 м.
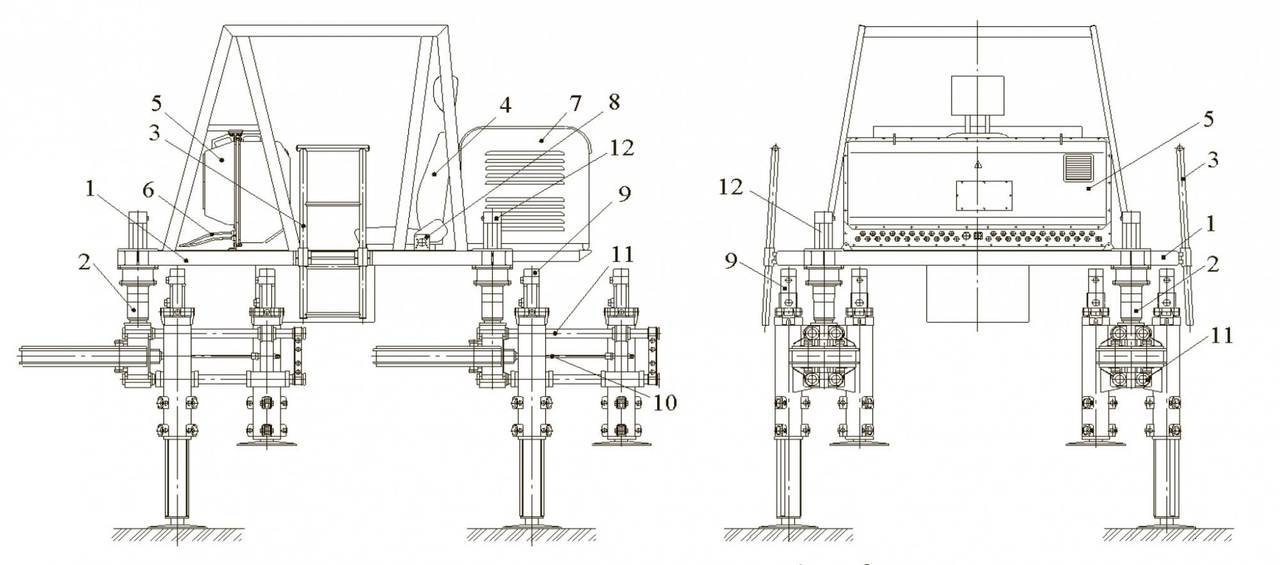
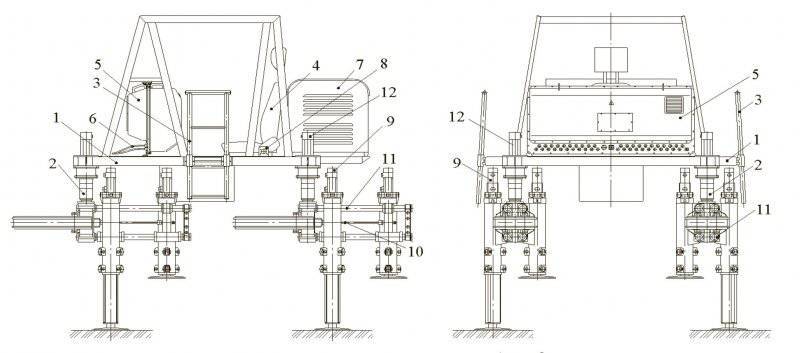
Конструктивная схема шагающего робота «Ортоног»: 1 - рама; 2 - шагающие движители; 3 - лестница; 4 - кресло оператора; 5 - бункер электрооборудования; 6 - сеть кабельная; 7 - бортовой источник питания; 8 - панель; 9 - механизм вертикальных перемещений; 10 - механизм горизонтальных перемещений; 11 - направляющая; 12 - механизм поворота
Каждый из четырех блоков ходовой части условно разделен на три элемента: механизмы вертикальных перемещений, механизмы горизонтальных перемещений и механизмы поворота. Первые имеют в своем составе электроцилиндры и отвечают за подъем и опускание круглых опор, размещенных на выдвижных штоках. «Ортоног» имеет восемь таких опор, по две на каждый блок ходовой части. Механизмы горизонтальных перемещений, состоящие из направляющих и приводов, предназначаются для передвижения цилиндра и штока с опорой. В составе каждого блока ходовой части имеется по два комплекта направляющих и приводов, по одному на каждый цилиндр с опорой. Наконец, механизмы поворота разворачивают весь блок ходовой части вокруг вертикальной оси. Вся ходовая часть экспериментальной машины построена на основе электрических приводов.
Движение шагохода «Ортоног» по ровной поверхности выглядит следующим образом. Машина поднимает четыре опоры из восьми (по одной от каждого блока ходовой части) и сдвигает их вперед при помощи механизмов горизонтальных перемещений. Далее опора опускается на поверхность и цикл повторяется, но на этот раз поднимаются и перемещаются вперед другие четыре опоры. Во время перемещения «Ортоног» попеременно использует приводы вертикальных перемещений, а механизмы горизонтальных работают почти все время. При необходимости в действие приводятся механизмы поворота. Синхронная или раздельная их работа обеспечивает поворот на необходимый угол. Как видно из конструкции, экспериментальный шагоход может совершать повороты с минимальным радиусом.
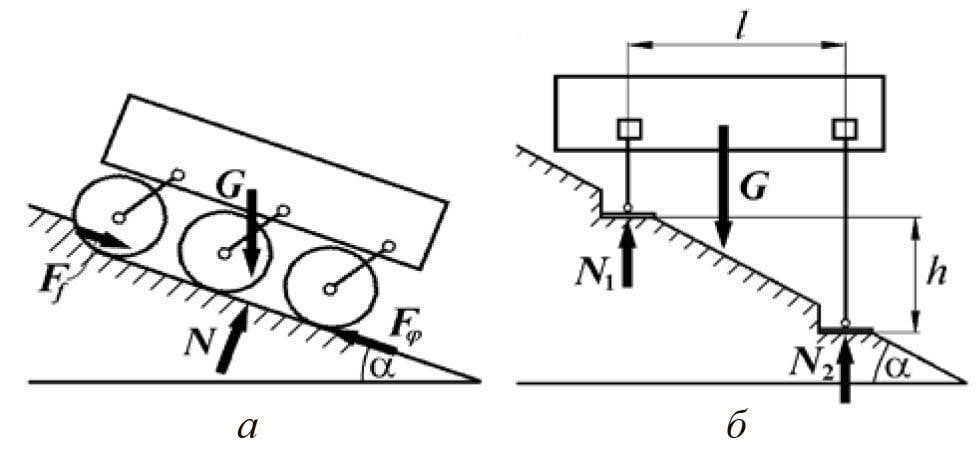
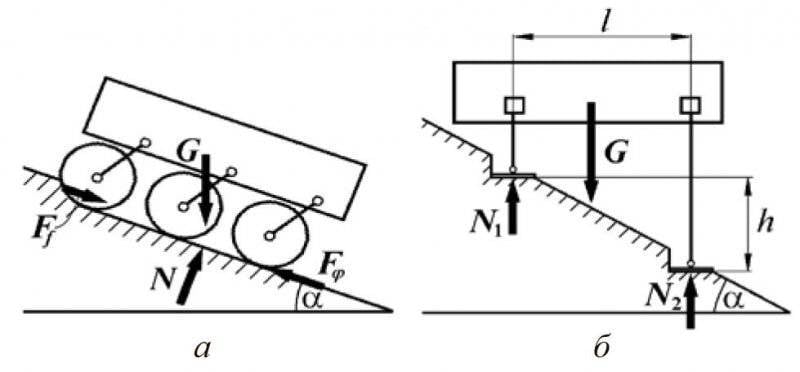
Движение по уклону колесной (а) и шагающей (б) машины
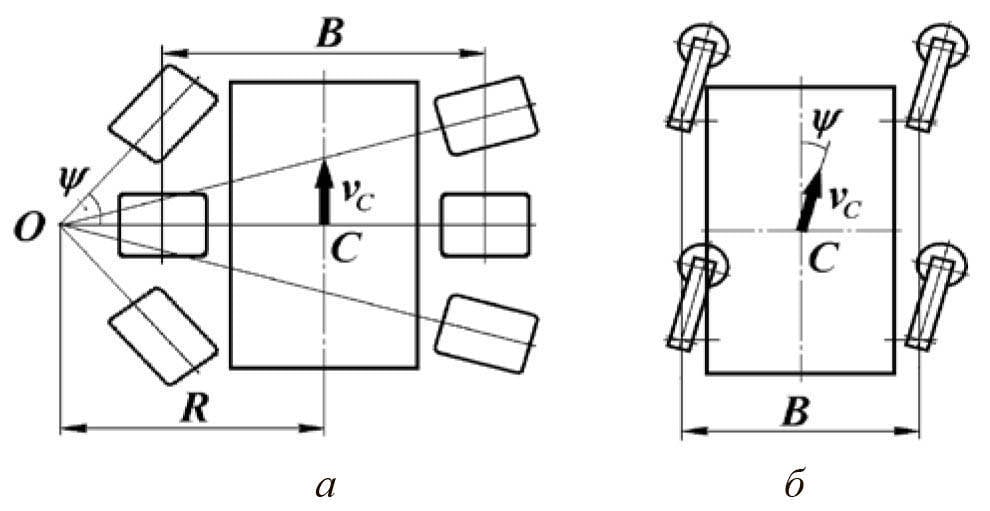
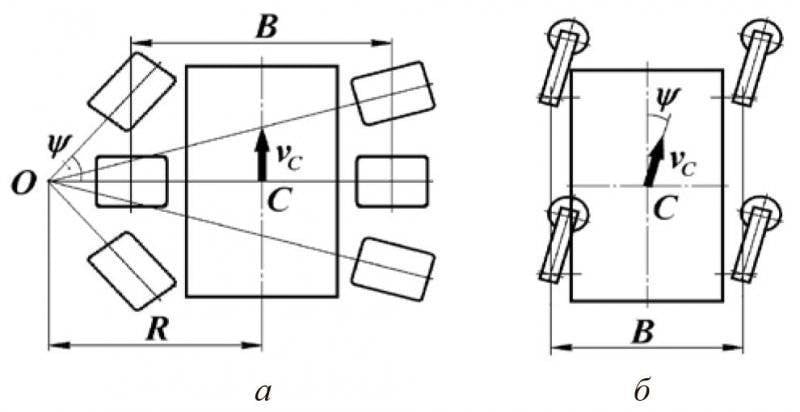
Рис. 5. Схема поворота колесной (а) и шагающей (б) машины
Все механизмы ходовой части оснащены датчиками, собирающими информацию об их работе. Сведения передаются на пульт оператора-водителя и он имеет возможность вносить коррективы в работу машины. Именно с работой водителя связан один из самых больших вопросов в рамках проекта «Ортоног». Как показывает практика, человек может эффективно управлять машиной лишь при движении по ровной поверхности. Если же возникает необходимость в движении по пересеченной местности и т.п. сложным маршрутам, то оператор не может самостоятельно уследить за работой всех механизмов и подобрать нужные в тот или иной момент алгоритмы работы. В связи с этим одновременно с технической частью машины разрабатывался автоматизированный комплекс управления.
Изначально на испытаниях экспериментальной машины использовался следующий метод управления. Оператор комплекса контролировал автономную работу аппарата по информации, передаваемой видеосистемой. При необходимости, в первую очередь, при преодолении препятствий, он вмешивался и вносил необходимые коррективы в работу шагохода. Подавляющее большинство действий по управлению машиной производилось автоматикой без участия человека. При этом автоматика экспериментального аппарата получала информацию о работе систем и положении машины в пространстве только с датчиков. Никакие меры по использованию видеосигнала не принимались. Результатом такого подхода к сбору информации, необходимой для управления машиной, стала ситуация, при которой электроника не может самостоятельно обходить препятствия и для этого необходимо вмешательство оператора.

Такие испытания помогли собрать сведения, необходимые для настройки адаптивного управления шагоходом. Специальная аппаратура фиксировала все действия оператора, информацию с датчиков, а также записывала сигнал внешних и встроенных видеокамер. В дальнейшем все записанные данные были сопоставлены и выделены те фрагменты данных, которые соответствовали определенным действиям механизмов. Эти сведения использовались для «обучения» автоматики. Результаты испытаний и доводки систем управления на первый взгляд кажутся не слишком высокими. Тем не менее, уже в конце прошлого года аппарат «Ортоног» умел самостоятельно и без помощи оператора двигаться по прямым и наклонным поверхностям и удерживать необходимое положение корпуса независимо от угла наклона поверхности. Кроме того, аппарат «научился» самостоятельно останавливаться, наткнувшись на препятствие, и определять размеры помехи при помощи имеющихся механизмов ходовой части.
Несмотря на то, что аппарат «Ортоног» пока не может стать основой для шагающих машин, пригодных к практическому применению, уже сейчас видны его перспективы. Как следует из имеющихся сведений о ходе работ по этому проекту, сотрудникам ВолГТУ и ЦКБ «Титан» удалось разработать эффективный шагающий движитель и создать алгоритмы управления им, имеющие хорошие перспективы. По официальным данным, машина «Ортоног» может разгоняться до скорости свыше 1,6 километра в час. Длина и высота шага опоры в 45 см позволяет аппарату преодолевать препятствия высотой до 40-45 см, сохраняя горизонтальное положение рамы. При более сложных маневрах, подразумевающих наклон аппарата, максимальная высота препятствия увеличивается до 80 см. Максимальная ширина пересекаемого рва – 0,9 метра. Шагающий движитель способен преодолевать подъемы до 40°. При движении поперек склона «Ортоног» сохраняет устойчивость при угле наклона поверхности до 60°. Поворотные блоки ходовой части позволяют аппарату менять направление движения на любой угол относительно его продольной оси. При необходимости возможно движение боком и разворот с радиусом чуть более одного метра.
О перспективах проекта «Ортоног» пока говорить рано. Этот проект и построенный в соответствии с ним аппарат носят исключительно экспериментальный характер, что полностью определяет дальнейшие планы организаций-разработчиков. В ближайшем будущем кафедра «Теоретическая механика» ВолГТУ и ЦКБ «Титан» продолжат развитие шагающего движителя и систем управления для него. Только после создания полноценных алгоритмов, способных обеспечивать работу шагохода на различных поверхностях и в различной обстановке возможно начало работ над следующим экспериментальным образцом. Следующий проект может быть использован для совершенствования имеющихся наработок и их адаптации к практическому применению. Вряд ли новый проект появится в течение ближайшего времени: на завершение работ над аппаратом «Ортоног», возможно, потребуется затратить несколько лет.
По материалам сайтов:
http://cdbtitan.ru/
http://dtm.vstu.ru/
http://vpk.name/
Информация