Начало пути шагающих роботов
В настоящее время активно принимаются на вооружение различные роботизированные системы, и, кроме того, начинает формироваться новое поколение систем, способных пройти там, где может пройти человек. Впрочем, многое еще должно быть сделано, прежде чем их можно будет увидеть рядом с собой на ТВД.
Наземные и воздушные беспилотные системы представляют собой важный инструмент для современных военных, их применение уже стало нормой, а не исключением. Конфликты в Ираке и Афганистане привели к их экспоненциальному росту, миллиарды долларов были потрачены на разработку и закупку подобных систем.
В то время как системы, подобные БПЛА Reaper, привлекают к себе очень большой интерес, работа их наземных аналогов также заслуживает всяческих похвал. Вследствие того, что самодельные взрывные устройства (СВУ) представляют собой наибольшую угрозу для сил, развернутых в Афганистане, «трудолюбивые» автоматические наземные аппараты (АНА) оказались в центре внимания. Эти системы ежедневно участвуют в так называемых «глупых, грязных и опасных» задачах, а при выполнении своих обязанностей они часто получают повреждения, порой «летальные». Несмотря на огромные суммы денег, инвестируемые в роботизированные системы, их сфера деятельности до сих пор ограничена задачами обезвреживания взрывоопасных предметов, что, исходя из оперативных потребностей, является совершенно обоснованным. Впрочем, в настоящее время функциональность АНА начинает расширяться, они всё чаще выполняют разведывательные задачи и даже задачи материально-технического снабжения.
Появились возможности расширения сферы применения роботизированных систем и не только в военном секторе. Прогресс в роботизированных системах может привести к созданию систем, которые способны работать вместе и взаимодействовать с человеком на физическом или социальном и когнитивном уровне. Они также по большей части смогут выполнять задачи для людей или вместе с ними в промышленной среде, например, на заводах. Военные наземные роботизированные системы, имея множество потенциальных задач, могли бы стать лучшим другом каждого солдата, например, могли бы носить его снаряжение, вести передовое наблюдение и даже эвакуировать его с поля боя. Однако, остается одна большая проблема: нынешние системы, несмотря на их обилие, не могут пройти там, где может пройти солдат. Многие АНА имеют высокую степень подвижности, но их колесные и гусеничные конфигурации ограничивают их применение. Чтобы роботы смогли стать полезными на все сто процентов, им необходимо научиться ходить. «Шагание» должно стать единственным видом локомоции (совокупность согласованных движений, посредством которых робот перемещается в пространстве), ну, или хотя бы частью возможностей гибридной конструкции.
По большей части инвестиции в шагающие системы были минимальными, мощные оборонные предприятия едва коснулись этой области, здесь «правят бал» специализированные компании, университеты и исследовательские институты. В то время как этим системам, по большой части, было уделено мало внимания, возможности роботов, которые могут работать бок о бок с человеком или вместо него, не остались незамеченными. И такие мероприятия как DRC (DARPA Robotics Challenge — практические испытания роботизированных систем по программе Управления перспективных исследований и разработок министерства обороны США) обеспечивают действенную поддержку этим технологиям.
Шагающие роботы имеют много преимуществ: они хорошо подходят для пересеченной местности, могут подниматься по ступеням, преодолевать рвы и работать там, где не могут колеса и гусеницы. Это комплексные инженерные задачи, и для использования преимуществ роботов в сферах гражданского и военного применения необходимы значительные ресурсы.
Одной из первых задач, которую военные рассматривают для шагающих систем, является логистика. В Афганистане, в частности, вследствие неблагоприятных условий окружающей среды и агрессивных действий повстанцев могут быть значительные проблемы с мобильностью, что способно негативно сказаться на традиционном материально-техническом снабжении, осуществляемым наземными или воздушными платформами. Развернутый личный состав также переносит на себе всё более тяжелые грузы, поскольку объем снаряжения, который он задействует в процессе несения службы, постоянно и стремительно растет.
Шагающая система поддержки отделения Legged Squad Support System
С этой целью корпус морской пехоты и армия США некоторое время назад изучили возможность переделки небольших пилотируемых транспортных средств в автоматические системы; армия с заметным успехом испытала уже систему поддержки отделения SMSS (Squad Mission Support System) от Lockheed Martin в Афганистане. Впрочем, основное беспокойство вызывает неспособность SMSS и других подобных транспортных средств передвигаться там, где могут передвигаться солдаты и пехотинцы, которым они должны содействовать. Солдатская выкладка в Афганистане превратилась в такую серьезную проблему, что на службу были призваны мулы с целью поддержки войск, несущих службу на труднопроходимой местности. Но такой подход представляет собой лишь временную меру.
Для решения этой проблемы морская пехота работает в настоящее время с DARPA над шагающей системой поддержки отделения LS3 (Legged Squad Support System). Целью этих работ является объединение мобильности и логистических возможностей в системе, которая могла бы перемещать 400 фунтов (181 кг) снаряжения на расстояние более чем 32 км без необходимости вмешательства в течение 24 часов, а также могла бы поддерживать темп с подразделением, которому она придана.
Четырехногий робот LS3 стал развитием системы BigDog, которая также была создана компанией Boston Dynamics. Последние полевые испытания робота были проведены в декабре 2012 года в Вирджинии; двухнедельные работы проводились в сотрудничестве с лабораторией ведения боевых действий корпуса морской пехоты. Ноги LS3 имеют гидравлические приводы с сенсорами для распределения усилий и позиционирования всех шарниров. Система может бегать и поддерживать равновесие на рыхлой, скользкой и неровной почве, а также подниматься при потере равновесия.

Робот LS3 имеет высокую степень подвижности и может переносить на себе значительные грузы
Во время испытаний были продемонстрированы пять возможностей системы: 1) голосовые команды; 2) ночные операции; 3) приказы «иди»; 4) восприятие окружающей обстановки; 5) интеллектуальная постановка ног.
Руководитель программы LS3, лейтенант-полковник Джозеф Хит, определил эксплуатационную надежность и восприятие платформы в качестве основных задач, которые предстоит решить для этой системы. В то время как первая представляет собой инженерную задачу, вторая потребует совершенствования когнитивных возможностей системы. Эта проблема робототехники решается уже не столь легко, и ей необходимо уделить очень много внимания.
Если роботизированные системы, шагающие или иного типа, должны работать в реальной обстановке, их осведомленность об окружающем пространстве, в котором они развернуты, станет ключевым условием их эффективности.
Целью программы LS3 является функционирование системы без повышения когнитивной нагрузки на пехотинцев. Чтобы добиться этого, когнитивная нагрузка должна быть возложена на саму систему.
«Если вы хотите, чтобы транспортное средство было дистанционно управляемым или просто следовало бы за оператором, я полагаю, программное обеспечение в этом случае — не проблема. Если же вы хотите, чтобы оно двигалось само по себе и шагало через лес без персонального контроля, тогда внезапно вы оказываетесь на совершенно другом уровне сложности», — пояснил профессор Грегори Дудек, директор школы компьютерных наук и бывший директор центра интеллектуальных машин.
«У нас есть шагающий аппарат, он может изучить и запомнить, на что похожа данная местность, и поэтому, если робот встречает такую же местность снова, ему не нужно много времени, чтобы понять, он уже выучил свойства подобной местности. Это выполнимо, но это может быть трудно… Наземная окружающая обстановка является, быть может, самой сложной: много препятствий, много переменных и много взаимодействий. И шагающие системы из-за своей универсальности также имеют больше различных типов отказа, они могут спотыкаться, падать, пнуть что-нибудь, но они раздвигают границы того, что мы можем делать. Я думаю, что шагающие системы относятся к очень сложным устройствам, но, как уже сказано, проблема самой шагающей мобильности — куда поставить свою ногу — даже в такой сложной системе, как LS3, решена довольно неплохо».
[media=http://www.youtube.com/watch?v=OuGZjsKQxbI]
Видео шагающей системы поддержки отделения Legged Squad Support System (с моими субтитрами)
Профессор Дудек считает, что главной задачей является обеспечение систем способностью воспринимать на дистанции: «Например, попробовать оценить на некотором расстоянии, заранее, свои возможности в преодолении груды строительного мусора, перед тем как вы ступите на нее. Я полагаю, в этом направлении предстоит еще много работы. Вопрос не только в том, может или не может робот идти куда-то, но как быстро он это может; будет важно иметь способность прогнозировать выполнение задачи в различных сценариях. Если вы не можете спрогнозировать выполнение своей задачи, тогда очень трудно выбрать последовательность действий».
Для того, чтобы улучшить процесс восприятия роботов и позволить им действовать самостоятельно, важно наделить их способностями к обучению. Несмотря на то, что сенсоры могут обеспечить ситуативную и физическую информированность, только посредством обучения роботы могут узнать, как лучше всего взаимодействовать со своим внешним окружением.
«Некогнитивные роботы глупы, поскольку они делают одни и те же ошибки снова и снова», — пояснил профессор Питер Джонкер из института робототехники Дельфтского университета, специализирующегося скорее на инжиниринге и взаимодействии робот/человек, чем на оборонных приложениях. Когнитивные системы учатся распознавать и получать информацию об объектах и их свойствах. Прогресс в восприятии и обучении робота отчасти обязан способности создавать большие справочные таблицы, они формируются из когнитивных зависимостей между входными и выходными данными; это стало возможным благодаря совершенствованию обработки данных и увеличению объема памяти на борту роботов. «Еще 10 или 15 лет назад мы не имели такой огромной памяти… а теперь у нас есть гигабайты памяти, поэтому мы можем хранить всё в справочных таблицах и это работает. По всей видимости, это похоже на работу мозга и система понятий и взглядов здесь точно такая же», — пояснил Джонкер. Кроме того, немаловажную роль здесь сыграло и наращивание вычислительных мощностей.
Применение роботов в реальном мире
Испытания в рамках DRC находится на передовых позициях в сфере разработки функциональных роботов имеющих применение в реальном мире, в данном случае — это оказание помощи в районах бедствия. Они соединяют вместе вопросы восприятия, мобильности и полезности, они отличаются несколькими уникальными особенностями, связанными с человеком. Одно из них — внешние условия, в которых роботы должны работать. DARPA признало, что бедствия и катастрофы происходят по большей части в окружающей среде, спроектированной для использования человеком, она не беспорядочна и структурирована.
В настоящее время задания, предусмотренные этими испытаниями (соревнованиями), включают: вождение универсального транспортного средства; движение своим ходом через нагромождение камней; удаление строительного мусора с дверного проема; открывание двери и вход в здание; восхождение по приставной лестнице и затем дальнейшее движение по зданию; использование инструментов для прохода через бетонную панель; определение и закрытие задвижки вблизи протекающей трубы; и замена компонентов, например, водяного насоса.
DARPA публично не предоставила информацию об уровне автономности, которую должны иметь роботы, но озвучило в начале соревнований, что задачи будут поставлены таким образом, чтобы подчеркнуть важность автономности роботов на уровне комплексного задания, например, роботу будет дана команда самостоятельно открыть дверь вместо пошаговых инструкций и тщательного контроля. DARPA также будет менять качество каналов связи во время испытаний и постепенно снижать его, чтобы посмотреть, как роботы будут справляться со своими задачами в таких условиях.
Профессор Дудек сказал, что уровень автономности роботизированных систем всегда является спорным вопросом. «Разговоры о том, сколько автономности будет в этих системах, я нахожу пустыми. Если вы хотите, чтобы они изначально работали хорошо и подходили вам, не надо, чтобы они были слишком автономными… Некоторые технологии хорошо понятны и хорошо работают, но я считаю, это плохая идея — сделать их автономными в ближайшем будущем… просто потому, что при возникновении проблемы возникает вопрос: кто возьмет на себя ответственность?»
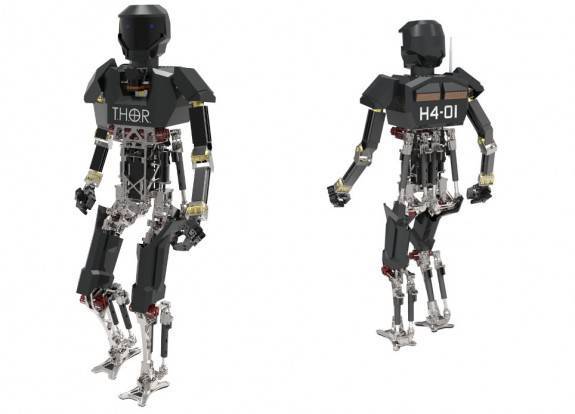
Команда Virginia Tech представляет на DRC нового гуманоидного робота THOR
[media=http://www.youtube.com/watch?v=_FcmRM9m13A]
Видеопрезентация робота THOR командой Virginia Tech
Гуманоидные системы
Хотя проектом DRC не оговаривается конфигурация участвующих в нем роботов, но несколько команд представили двуногие гуманоидные модели. То же самое относится и к предоставленным правительством системам.
Вопрос, какую форму должны принять шагающие роботы, горячо обсуждается, тогда как ответы, очевидно, зависят от роли системы. Появилось множество идей касательно применения гуманоидных моделей. «Это противоречивый вопрос», — пояснил Дудек. По его словам, «если вы опросите 10 специалистов по роботам, вы получите три или четыре разных ответа, и до некоторой степени эти ответы предсказуемы, исходя из географического положения человека… Существует четкое разделение между Японией в пользу гуманоидных проектов и Западной Европой, США и Канадой. Мое собственное мнение состоит в том, что человекоподобная двуногая локомоция — это не то, что нам нужно прямо сейчас».
Гуманоидные конструкции имеют два ключевых преимущества: одно из них состоит в том, что их форма позволяет им хорошо вписываться для работы в среду созданную для людей; второе заключается в том, что люди с большей вероятностью могут принять гуманоидных роботов. Доктор Хайке Валлери, специалист по биомеханическому инжинирингу в Дельфтском университете, пояснила: «Кинематика и органы управления человека развивались совместно, была найдена оптимальная модель, в том числе и с энергетической точки зрения… Поэтому, если мы делаем роботов с подобными свойствами, тогда, вполне вероятно, они будут вести себя так же, как люди».
Несколько команд, соревнующихся в DRC, представили проекты, которые несколько отходят от гуманоидной концепции.
В начале 2013 года команда из национального робототехнического инженерного центра Университета Карнеги-Меллона (CMU) озвучила подробности о своем участнике. Высокоинтеллектуальная мобильная платформа этого университета, созданная командой под названием Tartan Rescue, получила обозначение CHIMP (CMU Highly Intelligent Mobile Platform). Она представляет собой робота размером с человека, который скорее передвигается на резиновых гусеницах, встроенных в каждую из его четырех конечностей, а не ходит подобно человеку.
Логическое обоснование для такого подхода по обеспечению мобильности заключается в том, что движение на гусеницах предлагает большую скорость и оно проще, чем разработка шагающего решения. При необходимости CHIMP может также двигаться на гусеницах двух конечностей, например, когда необходимо использовать две другие конечности для выполнения трудных и сложных задач.
По словам руководителя команды Tartan Rescue Тони Стентса, по всей видимости, задания DRC скорее «заточены» под характеристики мобильных гуманоидных роботов, но в этом случае повышается сложность, энергопотребление и требуется больше вычислительных ресурсов.
CHIMP способен захватывать и контролировать объекты своими четырьмя манипуляторами на конце каждой конечности. Он также имеет практически человеческую силу и ловкость.
CHIMP использует бортовые сенсоры для построения 3D модели окружающего мира с наложенными текстурами, которые обеспечивают ситуационную осведомленность и позволяют ему сохранять равновесие. Такая же модель предоставляется оператору для визуализации местоположения и ориентации робота.

Робот CHIMP имеет гибридное конструктивное исполнение, в котором преимущества колесной локомоции (перемещения) сочетаются со способностью подниматься по ступеням и манипулировать объектами
Команда разработчиков указывает на управляемые сочленения робота CHIMP, разработанные национальным робототехническим инженерным центром, как на ключевые элементы, которые позволят выполнять различные задания в рамках DRC. Например, три сочленения в каждой конечности позволяют роботу иметь человекоподобный захват. К другим основным особенностям относятся «воспринимающая» голова и сенсоры шарниров, которые обеспечивают обратную связь с системой и позволяют роботу двигаться, держать предметы, убирать мусор и строительные отходы безопасным способом.
«Лично я считаю, что это правильное направление», — сказал профессор Дудек и добавил: «Я думаю, с чисто гуманоидными моделями очень сложно достичь эффективности касательно стоимости и надежности, даже несмотря на то, что испытания DARPA во многих отношениях предназначены для того, чтобы подчеркнуть необходимость в гуманоидном роботе. Тот факт, что вы видите людей, не стремящихся создавать гуманоидные модели для соревнования, которое задумано как конкурс гуманоидов, о чем-то говорит. Я считаю, что кто бы ни выиграл соревнования DARPA, он окажет влияние на развитие робототехники психологически, пускай даже и не с оптимальной конструкцией, поскольку ответы на некоторые вопросы будут даны самими итоговыми результатами этого проекта».
Доктор Валлери считает, что гуманоидные типы роботов не получат широкого применения: «Я не думаю, что антропоморфные конструкции получат широкое применение, конечно же, за исключением рук и ног; в перспективе не будет множества работоспособных человекоподобных роботов».
Работы по биомиметическим проектам (подражание биологическим существам) не ограничиваются гуманоидными платформами. Компанией Boston Dynamics и командой из биомиметической лаборатории Массачусетского технологического института разрабатываются роботы, являющиеся дальнейшим развитием проекта Cheetah («Гепард»). Эти системы продемонстрировали способность бегать с приличной скоростью. Робот Cheetah от компании Boston Dynamics удерживает мировой рекорд среди шагающих роботов, достигнув максимальной скорости 28,3 миль/час (45,5 км/ч). Следующее поколение роботов Cheetah, названное Wildcat («Дикая кошка»), сможет работать без привязного кабеля. Недавно начались первые испытания Wildcat, а практические испытания на открытом воздухе намечено провести в конце 2013 года. После того как будут решены все сложные инженерные задачи, системы подобного типа найдут применение в разведке и поисково-спасательных работах.
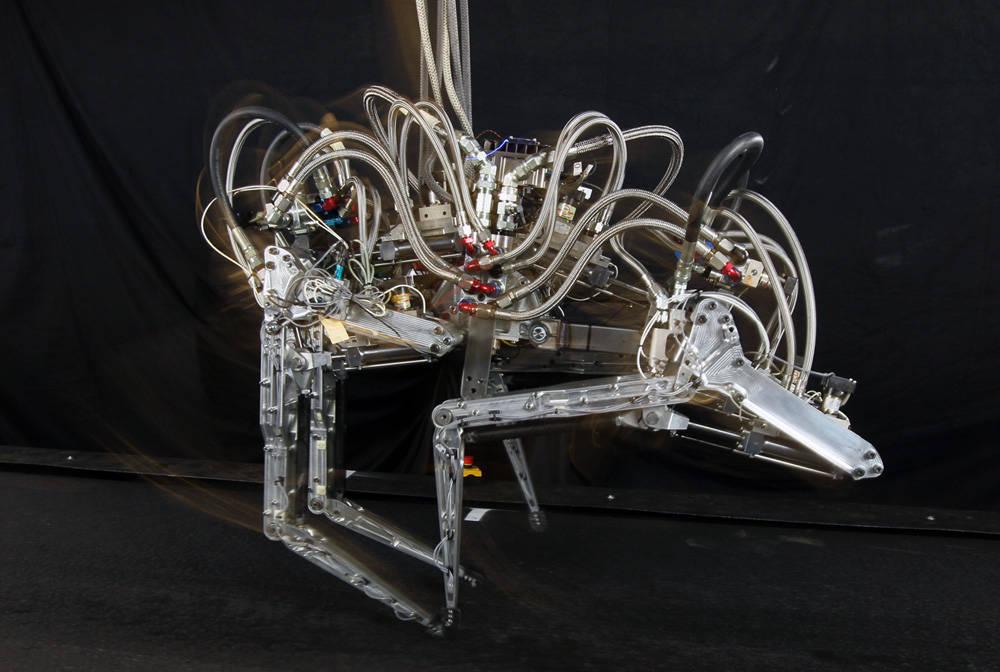
Шагающий робот Cheetah удерживает мировой рекорд скорости для подобных систем
[media=http://www.youtube.com/watch?v=chPanW0QWhA]
Видео рекордного забега робота Cheetah
Было разработано множество биомиметических систем, среди них есть конструкции, вдохновленные среди всего прочего тараканами и палочниками. Некоторые роботы обладают способностью взбираться на стены; их многоногие конфигурации позволяют иметь очень высокие уровни подвижности и устойчивости.
Проблема, которая как полагает Дудек, может возникнуть для когнитивных систем, заключается в их сертификации для безопасного использования, поскольку их поведение и возможности меняются в процессе обучения. Из-за строгих требований, устанавливаемых Пентагоном, еще большие трудности будут испытывать системы для военных. «Военные системы склонны раздвигать границы своей автономности, но при этом возрастает и цена неудачи».
Энергопотребление представляет, возможно, самую большую и сложную задачу для проектировщиков шагающих систем. Их сложные конструкции с гидравлическими и электрическими сервоприводами потребляют большое количество энергии, а текущие энергетические технологии не могут решить эти потребности. В роботе LS3 эта задача была решена за счет использования традиционного двигателя внутреннего сгорания, но это не подходит для всех систем и необходим значительный рывок в технологии аккумулирования энергии.
«Мы до сих пор имеем очень большие энергетические проблемы. Мы до сих пор имеем проблемы с транспортированием достаточного количества энергии, которое позволило бы системам быть достаточно эффективными и действительно автономными», — пояснил доктор Мартин Виссе, специалист по шагающим системам в Дельфтском технологическом университете. Профессор Дудек полагает, что для решения этой проблемы робототехническая промышленность может с пользой взять разработки из других областей: «Я думаю, что движущий импульс дадут другие отрасли промышленности, поскольку управление энергопитанием мобильных устройств является огромной проблемой во многих областях, например, в электромобилях и переносных электронных устройствах».
Роботы могут получить выгоды и в других отраслях, а не только в энергетической сфере. Ведь необходимые роботам сенсорные системы по большей части разрабатываются где-то еще и в основном соответствуют текущим требованиям.
«Я не вижу сенсорные системы как область, куда могут прийти серьезные революционные исследования. Я полагаю, что получение высокоэффективных лазерных дальномерных сканирующих устройств, небольших и дешевых — вот проблема, в решение которой должно быть вложено много труда. Это должно произойти и многое будет решаться в гражданском секторе», — сказал Дудек, пояснив при этом, что «технологии лазеров и лидаров (лазерных локаторов) стали чрезвычайно популярными, мощность этих устройств увеличилась, но их применение в шагающих системах является головной болью. Сразу повышается стоимость системы, поэтому очень важно добиться создания дешевого надежного лидара, который выдерживал бы толчки и тряску».
Доступная технология
Доктор Виссе отметил доступность одного сенсора, оценив это как важный прорыв: «3D видение развивается, и немалая заслуга в этом сенсора Kinect от Microsoft. Реальный рынок для него гораздо больше, чем рынок роботизированных систем, поэтому нет необходимости разрабатывать что-то подобное в робототехнике».
Виссе напомнил об еще одной разработке, которая пришла из сферы программного обеспечения. Он сказал, что открытая операционная система для роботов Robot Operating System позволила робототехникам написать код, который может интегрировать такие сенсоры как, например, Kinect, с роботами.
С механической точки зрения сложные задачи, по всей видимости, сосредотачиваются на надежности и снижении массы материалов и компонентов.
«Я полагаю, реальные проблемы в развертывании подобных систем являются в некоторой степени прозаичными, здесь вопрос состоит в том, как обращаться с механическими поломками и сделать систему достаточно надежной, — сказал Дудек. — Робототехника особо нуждается в надежности своих систем, в особенности шагающих роботов. Шагающие системы будут иметь большие вибрации, поэтому все, что вы внедрите в эти системы должно быть устойчивым к тряске… поэтому требования к энергосистемам, аккумуляторам и остальным компонентам повышенные. Это большая проблема».
Роботы одной американской компании демонстрируют, какими функциональными могут быть современные системы. Доктор Виссе заметил: «Системы от Boston Dynamics справляются с инженерными проблемами хорошо. Нам просто нужно, чтобы все компоненты работали слаженно и были надежными — это вопрос денег и хорошего проектирования».
Доктор Валлери отметила важность создания легких роботов в целях общей безопасности. «Есть множество причин сделать роботов легкими; вам нужно меньше энергии и это менее опасно. Если вы делаете гуманоидного робота, скорее всего он будет работать рядом с людьми». Она полагает, что необходима работа по улучшению исполнительных механизмов и что они должны быть легче и более эффективными.
Доктор Виссе считает, что существуют препятствия не только в виде больших технических сложностей. Нынешний подход к развитию роботизированной технологии не приносит большой пользы промышленности, и в этой связи необходимы перемены. «Я думаю, что реальные разработки будут только тогда, если мы найдем сферу применения и найдем большую группу пользователей для нашей технологии и устойчивый бизнес, который платит за постоянное развитие. Я действительно считаю, что нам необходимо взглянуть на то, что мы можем использовать прямо сейчас для того, чтобы улучшить жизнь людей… Я полагаю, мы должны работать в поэтапном пошаговом режиме, мы должны сделать всё для того, чтобы создать и использовать рынки, а не создавать технологические «дорожные карты», где мы сосредоточимся только на развитии технологии. Я не думаю, что путь вперед — это создание более продвинутых гуманоидных роботов в данный отрезок времени, я считаю, что роботизированная технология может стать дешевле за счет повсеместного создания массовых рынков».
Информация