Наземные роботы. От забрасываемых систем до безлюдных транспортных колонн (Часть 5)

Последние несколько строк предыдущего параграфа плавно подвели нас к области использования тяжелых наземных роботов, которая выходит за рамки чисто логистических задач. Эту благодатную, интересную и объемную тему попытаемся раскрыть далее хотя бы частично.
G-Nius: Конечно же, компания G-Nius, израильское совместное предприятие между Elbit Systems и Israel Aerospace Industries, имеет самый большой практический опыт в тяжелых патрульных и вооруженных роботах. Ее первый роботизированный аппарат Guardium, позднее переименованный в Guardium Mk.1, поступил в эксплуатацию в 2007 году. Вариант Mk.1 базировался на внедорожном шасси Tomcar, позднее логически последовал вариант Mk.2 на базе шасси того же происхождения, но грузоподъемностью 400 кг, что вполне подходит для задач перевозки грузов. Затем последовал вариант Mk.3 на базе пикапа Ford F-350. Оригинальный Guardium до сих патрулирует аэропорт Бен-Гурион в Тель-Авиве, а израильская армия приобрела у компании G-Nius несколько роботов.

Guardium Mk1 от G-Nius служит уже несколько лет, обеспечивая безопасность вдоль периметра аэропорта Бен-Гурион в Тель-Авиве

Guardian Mk2 от G-Nius имеет грузовую площадку, на которую можно уложит 400 кг припасов

Hybrid Multipurpose Vehicle (HMV), новейший вариант в линейке роботов G-Nius, был показан на выставке Eurosatory 2014

AvantGuard Mk 1 от G-Nius на базе тактического плавающего аппарата наземной поддержки Dumurs Tags (Tactical Amphibious Ground Support); на фото показан с ДУБМ от Elbit Systems
Более ориентирован на боевое применение AvantGuard, который базируется на аппарате Dumur Tags vehicle (Tactical Amphibious Ground Support). Четырехгусеничное шасси массой 1,75 тонны с турбодизельным двигателем Kubota мощностью 100 л.с. развивает максимальную скорость 20 км/ч. Четыре гусеницы каждая длиной 0,91 метра и шириной 0,42 метра обеспечивают низкое удельное давление на грунт и оптимальную подвижность. При грузоподъемности в одну тонну могут устанавливаться различные типы модулей, включая дистанционно управляемые боевые модули (ДУБМ). После того как был разработан вариант Mk2 на базе БТР M113, этот робот получил обозначение в AvantGuard Mk.1.
В целом, в течение последних семи лет роботы G-Nius отработали более 60 000 часов и, тем самым, обеспечили компанию бесценной информацией от операторов этих систем. Новейшая платформа, показанная на выставке Eurosatory 2014, базируется на шасси 4x4 с двумя силовыми установками с каждой стороны. Это могут быть дизельный и электрический двигатели, что позволяет получить гибридный аппарат; отсюда и имя Hybrid Multipurpose Vehicle (HMV) данное компанией G-Nius своему новейшему изделию. Прототип был оборудован мачтовой оптико-электронной станцией и боевым модулем от Elbit Systems. Первые роботы G-Nius были оборудованы специальными системами, но в настоящее время израильская компания разработала не зависящий от платформы дополнительный комплект, который будет описан в соответствующем разделе.
Qinetiq: Благодаря контрактам с различными оборонными организациями, включая командование силами специальных операций, и значительному вложению собственных средств компания Quinetiq разработала продвинутую модульную вооруженную роботизированную систему Maars (Modular Advanced Armed Robotic System), которая представляет собой вооруженный вариант разведывательного робота. Гусеничная платформа с приводом от электродвигателей он развивает скорость до 7 км/ч и весит 165 кг.


Вооруженный робот Maars от компании Quinetiq
Фактически это небольшая боевая машина, вооруженная 7,62-мм пулеметом M240B с боезапасом 450 патронов и счетверенной 40-мм гранатометной установкой на базе M203. Стволы установки выбираются индивидуально, она может стрелять летальными гранатами, например осколочно-фугасными, осколочно-фугасными двойного назначения или воздушного подрыва, а также нелетальными боеприпасами, например, резиновыми пулями, дробью, слезоточивым газом, дымовыми, светошумовыми и осветительными гранатами. Наращивание силового воздействия может начаться с нелетальных вариантов, например голосовых сообщений, передаваемых через двухсторонний мегафон, в который также встроена сирена на 120 дБ, а также с устройства предупреждения на зеленом лазере, предупреждающего или ослепляющего потенциальную угрозу. Башня может вращаться на 360° с угловой скоростью 155°/с, вертикальные углы наведения составляют -20°/+60°. Круговой обзор на 360° обеспечивается оптико-электронной станцией на опорно-поворотном устройстве, которая включает дневную камеру с цифровым увеличением x12 и полем зрения 75° и тепловизионную камеру разрешением 320x240 с цифровым увеличением x2 и полем зрения 36°. Эти параметры эквивалентны характеристикам панорамного перископа командира танка; прицелы же «стрелка», установленные соосно с пулеметом, представляют собой дневную камеру с оптическим увеличением x26 и цифровым увеличением x12 и тепловизионную камеру разрешением 640x480 с полем зрения 47° FoV и цифровым зумом x4, обеспечивая прицеливание ночью или в плохих условиях; лазерный дальномер измеряет дистанцию до цели и передает ее в систему управления огнем (СУО).
Может быть добавлена система определения выстрела для обеспечения СУО данными о цели. «Пилот» полагается на переднюю и заднюю дневные/ночные камеры с полем зрения 95°. Время работы варьируется от трех до двенадцати часов в зависимости от выполняемой задачи; интегрированный режим сна позволяет сэкономить энергию аккумуляторов, увеличивая время автономной работы до недели. Maars может управляться либо с помощью общего для большинства роботов компании тактического контроллера QinetiQ Tactical Robotic Controller, либо посредством переносного компьютера Toughbook Laptop Controller. Система всегда контролируется оператором, который мгновенно может отключить питание особой кнопкой на ручном контроллере. В настоящее время пять аппаратов Maars тестирует американский корпус морской пехоты, который занимается описаниям технико-тактических методик исходя из приобретаемого опыта. В перспективе компания QinetiQ рассматривает работу по голосовым командам с целью снижения нагрузки на оператора.
Northrop Grumman: Взяв за основу логистический робот Camel, компания Northrop Grumman разработала вооруженную платформу под обозначением Madss (Mobile Armed Dismount Support System – мобильная вооруженная система поддержки пехоты). Благодаря своей большой грузоподъемности платформа способна принять среднекалиберное вооружение, в данном конкретном случае 7,62-мм пулемет M240B, установленный в боевой модуль. Предлагается также альтернативное вооружение, например 40-мм автоматический гранатомет MK-19, тяжелый пулемет M2, легкий пулемет M249, а также 25-мм и 30-мм пушки с малым откатом. Также могут быть установлены нелетальные системы, например FN Herstal FN303.

Mobile Armed Dismount Support System или MADSS – это вооруженный вариант робота Camel; на фото во время огневых испытаний

Турецкая компания Gate Elektronik разработала Robas, который имеет четыре поворотных гусеницы для преодоления различных препятствий, в том числе и ступеней
Gate Elektronik: Среди тяжелых платформ робот Robas, разработанный турецкой компанией Gate Elektronik, имеет довольно необычную архитектуру. Он отличается четырьмя укороченными гусеницами, каждая приводится в действие от электродвигателя соединенного с ведущей звездочкой; натяжная звездочка подпружинена для лучшего натяжения гусеницы. Необычно в роботе то, что каждый из двигателей позволяет поворачивать свою гусеницу для изменения угла атаки с целью оптимального преодоления ступеней, а также переваливания через препятствия. Аппарат Robas способен преодолеть препятствие высотой 800 мм.
Комплект аккумуляторов гарантирует автономную работу в течение четырех часов, максимальная дальность действия составляет 25 км, а максимальная скорость 10 км/ч. Радиус действия от консоли составляет один километр. Масса пустого робота Robas составляет 250 кг, а его грузоподъемность 150 кг. Это позволяет устанавливать системы разного типа, например стабилизированное вооружение, оптико-электронные станции, обзорные радары, комплекты обнаружения мин, глушители и т.д.


Вооруженные роботизированные платформы TRP2 FOB от компании Oto Melara близки к своей квалификации, но могут упустить время для развертывания в Афганистане
Oto Melara: Если небольшой TRP3 NEC предназначен для пехотных подразделений, то модель Oto Melara TRP2 создавалась как более тяжелая и более эффективная система, повышающая возможности разведки и сбора информации в разведывательных подразделениях итальянской армии. Впрочем, ситуация в Афганистане где риски для солдат, охраняющих передовые оперативные базы очень высоки, заставила ускорить процесс создания вооруженного робота, предназначенного для патрулирования периметров этих баз. TRP2 FOB (также известен под обозначением TRP2 Combat) был доработан из существующей платформы, которая уже включала большую часть необходимых параметров, например возможность разборки на переносные модули. Гусеницы приводят в движение бесщеточные электродвигатели, позволяющие развить скорость 15 км/ч. Литий-ионных батарей хватает на четыре часа работы. В дополнение к комплекту GPS/инерциальная система был установлен первый автономный навигационный модуль для обхода препятствий, значительно снижающий нагрузку на оператора, хотя он становится крайне необходим при работе в режиме навигации по промежуточным точкам.
С целью повышения мобильности робота при перемещении по лестницам длина гусеницы была увеличена по сравнению с прежним прототипом и добавлен прочный хвостовой рычаг. Система управляется с помощью модульного блока управления, состоящего из джойстика, блока связи и упрочненного компьютера. Оператор не только контролирует движение робота, но что более важно отвечает за открытие огня из бортового оружия, как правило, это штурмовая винтовка Beretta ARX160 5,56 мм или легкий пулемет FN Minimi такого же калибра или однозарядный 40-мм гранатомет Beretta GLX160. Позади установлена мачта, на поворотном устройстве которой крепится камера с увеличением, используемая для захвата цели, а также неподвижная широкоугольная камера, которая предоставляет оператору изображение местности впереди, а также передней части самого робота. Оптоэлектроника с узким полем зрения установлена на ложементе оружия: слева дневная камера, а справа неохлаждаемая тепловизионная камера от DRS Technologies.
Система тщательно протестирована на армейском полигоне в Nettuno, было отстреляно более 3000 малокалиберных патронов и 100 гранат. Робот TRP2 FOB оснащен дистанционным приводом взведения автоматического оружия, что позволяет ему покидать базу в полной безопасности, поскольку первый патрон подается в камору только при достижении целевой зоны. Что касается мобильности, то робот наездил уже немало километров; кроме того, были проверены возможности по преодолению брода, а также продемонстрирован радиус действия более одного километра. Компания Oto Melara организовала два курса по обучению 40 инструкторов. Восемь таких роботов заказала итальянская армия, но поскольку была задержана квалификация типа, то было поставлено всего два аппарата. Проведение предварительной технической проверки ожидалось в конце июля, после чего одна система могла быть отправлена в действующие подразделения для испытаний, а вторая для завершения тестов на электромагнитную совместимость. Учитывая, что итальянский контингент скоро покинет Афганистан, маловероятно, что робот TRP2 FOB будет там развернут.

Ближний план вооружения робота TRP2 FOB, состоящего из 5,56-мм автоматического оружия и однозарядного 40-мм гранатомета

Хотя и сохранив обозначение TRP2, робот TRP2 Rista имеет совершенно другое шасси в отличие от TRP2 FOB; на нем установлен сенсорный комплект Mini Colibri от Selex ES
Робот TRP2 RISTA (Reconnaissance, Intelligence, Surveillance and Target Acquisition – разведка, сбор информации, наблюдение, обнаружение и захват цели), также известный как TRP2 Cavalry, имеет несколько другое шасси. Он отличается гусеницей в форме перевернутой трапеции, которая гарантирует хорошую мобильность при перемещении по лестницам. Поскольку робот предназначен для выполнения особых разведывательных задач, то он может быть разобран на носимые за спиной модули массой менее 20 кг каждый, что при необходимости позволяет отказаться от перевозки его на машине до места старта. Максимальная боевой масса составляет около 90 кг и скорость 15 км/ч на плоской поверхности. Бортовая аппаратура представлена в виде оптико-электронной станции Mini Colibri от Selex ES, которая поднимается на руке пантографного типа. В сенсорный комплект входят неохлаждаемая тепловизионная камера разрешением 320x240 с полем зрения 4,6°, дневная ПЗС-камера с повышенной чувствительностью с переменным полем зрения от 2,4° до 46° и безопасный для глаз лазерный дальномер с дальностью действия 4000 метров. Рука может поворачиваться на ±180°, а сенсорная головка имеет углы наклона ± 40°. Этот робот обеспечит разведывательные возможности на ближних дистанциях для варианта машины Freccia Explorer 8x8, которая поступит на вооружение разведывательных подразделений итальянской армии. Дальняя разведка доверена БПЛА Horus от компании Oto Melara, который может запускаться из ствола пушки калибра 120 мм или из легкой трубы этого же калибра, установленной на разведывательный вариант Freccia Explorer.
Компания Oto Melara также разрабатывает робот TRP2 HD (Heavy Duty – тяжелые условия работы) маской около 300 кг и полезной грузоподъемностью 100 кг с намерением заменить существующие системы обезвреживания взрывоопасных предметов, используемые итальянскими вооруженными силами. Вооруженный вариант модели HD может быть вооружен оружием более крупного калибра, 7,62-мм пулеметом или другими системами вооружения. TRP2 HD частично финансируется также министерством экономического развития, поскольку предусматривается разработки и гражданские варианты.
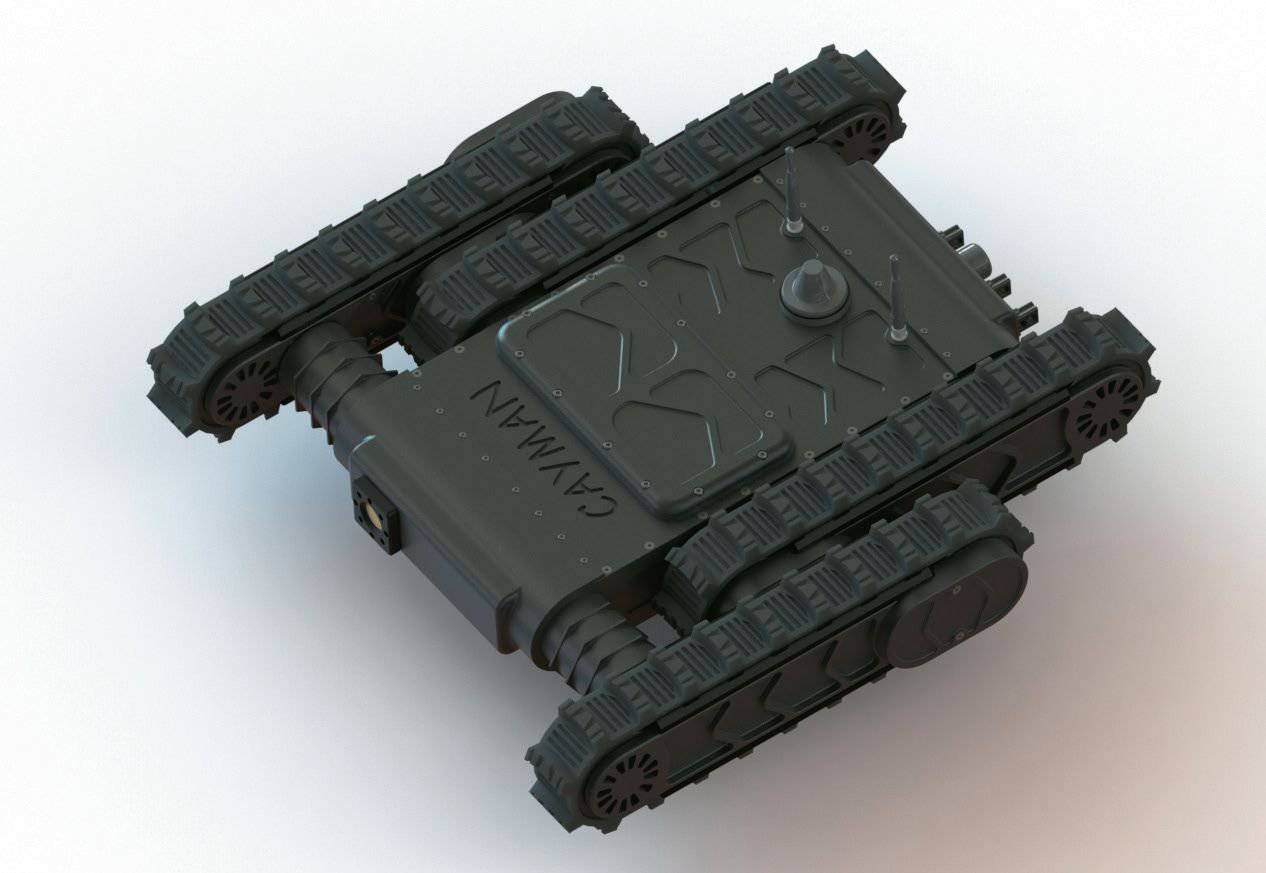
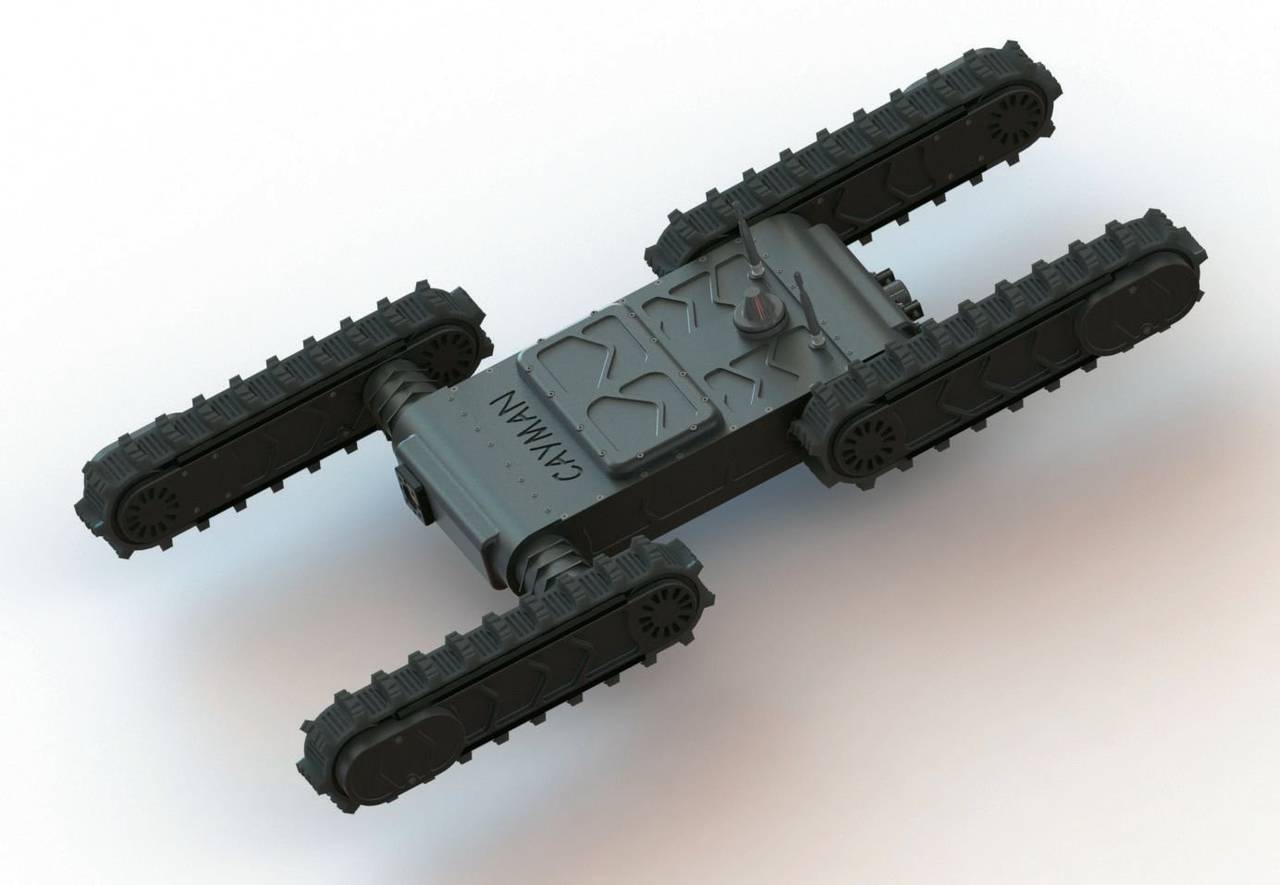

Робот Cayman от Tecrdon отличается четырьмя вращающимися гусеницами, которые позволяют роботу преодолевать сложные препятствия, тогда как его архитектура позволяет значительно уменьшить его размеры при транспортировке



Вместе со своим прицепом Quator от Tecdron может перевозить до 150 кг; значительная цифра для платформы массой 29 кг
Tecdron: В категории тяжелых наземных роботов французская компания Tecdron предлагает три системы. Первая из них, робот Cayman имеет довольно своеобразную архитектуру, поскольку каждую из его четырех гусениц вращает свой электродвигатель. При складывании две задние гусеницы поворачиваются и фиксируются вдоль корпуса аппарата, изготовленного из авиационного сплава в соответствии с традициями компании, тогда как две передние гусеницы складываются вдоль внутренних гусениц. Для того чтобы робот мог беспрепятственно перемещаться по ступеням, в шасси были установлены два двигателя, вращающие гусеницы. Необычное гусеничное решение позволяет получить оптимальную подвижность, робот Cayman способен справляться с уклонами 55° и двигаться по боковым уклонам 50°. Максимальная скорость составляет 6-8 км/ч. Робот весит 26 кг и может принять устройства массой до 20 кг; аппарат водонепроницаем до глубины один метр, а все его поверхности имеют антикоррозийную обработку. Дополнительные устройства могут быть интегрированы либо компанией Tecdron, либо заказчиком; интерфейс «plug and play» для этого робота в настоящее время находится в разработке.
Стандартные сенсоры включают переднюю широкоугольную камеру со светодиодной подсветкой и микрофоном; впрочем, с целью улучшения обзорности устанавливается вторая камера на короткой шарнирной руке (рука с камерой складывается в корпус, а во время работы поднимается над землей на высоту около 350 мм). Канал передачи данных обеспечивает дальность работы в прямой видимости один километр (300 метров в городе). Оператор использует для управления либо минипульт с 7-дюйм экраном, либо упрочненный ноутбук. Литий-ионный аккумулятор на 12 вольт емкостью 20 Ач обеспечивает три часа непрерывной работы, хотя второй аккумулятор удваивает это время. Компанией Tecdron предлагаются различная бортовая аппаратура, например видеокамера на панорамной головке с увеличением x36, термографическая видеокамера, лазерный дальномер, датчики газа и т.д. Робот Cayman дебютировал на выставке Eurosatory 2014, но замечания, уже получаемые от потенциальных пользователей, приведут, несомненно, к следующему усовершенствованному варианту.
Колесным эквивалентом Cayman в портфолио компании Tecdron является робот Quator 4x4 массой 29 кг и колесами диаметром 260 мм. Ходовые характеристики чуть хуже, чем у гусеничного аналога, но он все же справляется с уклонами 45° и боковыми уклонами 40°. Он может преодолевать препятствия высотой 200 мм. У него такой же набор сенсоров как у гусеничного Cayman, отличие только во второй камере, установленной сзади. Литий-ионный аккумулятор 24 вольта имеет большую емкость 30 Ач, его заряда хватает на четыре часа работы. Quator может нести груз массой до 50 кг и тянуть прицеп с грузом 100 кг. Специальный фиксатор позволяет при помощи задней камеры подцепить к роботу прицеп. Quator оборудован таким же каналом передачи данных и может принять такую же аппаратуру, как и робот Cayman. Система полностью внедрена в серийное производство, а французская армия является одни из ее пользователей. Для Quator разрабатываются гусеница, а также роботизированная рука-манипулятор, которая находится на финальной стадии разработки.
Чемпионом среди роботов компании Tecdron является Quator XL 4x4. Хотя его имя похоже на имя предыдущего робота, приставка XL говорит о его массе 260 кг и способности перевозить груз массой 500 кг. Его основной задачей является перевозка снаряжения пеших солдат, но на него можно установить и разведывательное оборудование. Каждое колесо диаметром 390 мм вращается от электродвигателя мощностью 1500 Вт, что при умножении на 4 обеспечивает хорошее тяговое усилие и способность преодолевать склоны 40° и боковые уклоны 35°. Высота вертикальных препятствий составляет 300 мм, в то время как максимальная скорость 15 км/ч. Как у предыдущей модели дистанционное управление также возможно на расстоянии до одного километра, хотя в Quator XL будет интегрирована полуавтономная система, которая пока находится на этапе доработки. Робот имеет типичные характеристики роботов Tecdron касательно конструкционных материалов, сенсоров и человеко-машинных интерфейсов. Quator XL является полностью готовым продуктом, но компания Tecrdon, тем не менее, тестирует новые варианты колес с целью повышения проходимости на сложных участках местности.
Для труднопроходимой местности компания Tecdron предлагает Scarab LX, гусеничную систему массой 215 кг с грузоподъемностью 200 кг, способную преодолевать вертикальные препятствия высотой 40 мм. Этот робот, хотя и подходит для разведывательных задач, скорее всего он будет особенно полезен в операциях по разминированию и для ближней инспекции в опасных зонах.

Гусеничный аппарат Scarab LX от компании Tecdron
Jordan Electronic Logistic Support: Название компании-производителя говорит нам о том, что гусеничная система Lynx, предлагаемая в качестве многозадачной платформы, разработана в Иордании. Шасси весит 120 кг и приводится в движении двумя электродвигателями. Впереди и сзади установлены две цветные ПЗС-камеры с приводом. Предлагаются различные комплекты бортовой аппаратуры, включая роботизированную руку, устройства подрыва, вилочный погрузчик, камеру на панорамной головке с оптическим увеличением x26 и цифровым x12. Вариант разминирования известен под обозначением Lynx-E/J. Lynx-C – это боевая конфигурация с дистанционно управляемым боевым модулем, в который устанавливается либо винтовка M16, либо 7,62-мм пулемет, либо реактивный гранатомет. Роботы Lynx являются частью иорданской программы модернизации солдата Jels и предназначены для интеграции в информационно-управляющую структуру этой системы.
KADDB: Еще одна иорданская компания KADDB показала на выставке Sofex 2014 новый многофункциональный робот Multi-Functional Robot (MFR) в конфигурации 6x6, у которого каждое колесо вращает свой электродвигатель. Передние и задние колеса выдвигаются из корпуса, что позволяет преодолевать де-факто препятствия с углом 90°. MFR может преодолеть брод глубиной 150 мм, траншею шириной 450 мм и развить скорость 12 км/ч (замедленная скорость 2 км/ч). Аккумулятор обеспечивает три часа работы. Робот MFR кроме стандартных двух управляемых камер (одна впереди и одна сзади) и двунаправленной аудиосистемы с микрофоном и громкоговорителем может оборудоваться различными комплектами аппаратуры и вооружения.
На выставке робот был показан с турельной установкой. В рекламных проспектах говорится о радиусе действия 800 метров, хотя представители компании настаивают на двух километрах. На турели установлена оптронная прицельная камера, которая позволяет оператору измерять дистанцию исходя из сравнительных размеров цели – человек, небольшая машина, большая машина, здание – и, таким образом, обойтись без лазерного дальномера. Турель вооружена двумя ракетными пусковыми установками РПГ-32 Hashim российско-иорданской разработки. Пьезоэлектрическое зажигание гарантирует 200 пусков. Может быть добавлен 7,62-мм пулемет. Робот MFR пока находится на стадии прототипа. И пока неясно, заменит ли эта новая наземная система робота, показанного в прошлом.


Иорданская компания KADDB разработала серию наземных роботов разной категории по массе. Представленный на выставке SOFEX 2014 робот MFR был вооружен двумя ракетными установками (на фото вверху)
Российская армия: Россия недавно показала вооруженного робота, который предназначен для развертывания в ракетных войсках стратегического назначения с целью повышения безопасности режимных объектов. Робот получил обозначение МРК-002-БГ-57, он базируется на гусеничном шасси, вся система весит около 1100 кг. Имя компании-разработчика не было названо; скорее всего, робот имеет гибридную движительную систему с запасом хода 250 км, максимальной скоростью 35 км/ч и продолжительностью работы 10 часов. Силовая установка расположена сзади, стабилизированный боевой модуль установлен в центре роботизированной платформы.

С целью повышения безопасности своих ракетных войск стратегического назначения Россия разработала и вооружила гусеничную роботизированную платформу МРК-002-БГ-57 тяжелым пулеметом
По данным российских источников робот способен нацеливаться, отслеживать и стрелять по целям в автоматическом и полуавтоматическом режимах. На турели установлена дневная, тепловизионная камера, лазерный дальномер и баллистический вычислитель, радиолокационная система доступна для дальнего наблюдения. На шасси также установлены управляемые камеры. На робота может устанавливаться различное вооружение, автомат Калашникова 7,62x39 с 500 патронами или 12,7-мм пулемет с 30 патронами или 30-мм автоматический гранатомет, либо АГ-17A либо АГ-30. В прямой видимости связь гарантируется на дальности до пять километров.
Информация