Наземные роботы. От забрасываемых систем до безлюдных транспортных колонн (Часть 6 заключительная)

Автоматические коробки передач с электронным управлением, дроссельные заслонки с электронным управлением плюс системы рулевого управления с электрическим управлением, которые в настоящее время становятся все в большей степени стандартными элементами современных транспортных средств, для разработчиков роботизированных платформ являются манной небесной. Действительно, теперь сигналы управления могут быть легко встроены в существующие процессорные блоки этих машин, а это означает, что громоздкие приводы, необходимые прежде, могут быть постепенно отправлены на свалку.
Особые преимущества подобных систем состоят не только в том, что они допускают перенос с одной машины на другую. В конечном счете, они станут настолько дешевыми, что система «встраиваемого управления» по существу будет оставаться на месте своей установки в машине и просто выключаться для возвращения к обычному использованию (т.е. ручному управлению) этого транспортного средства.
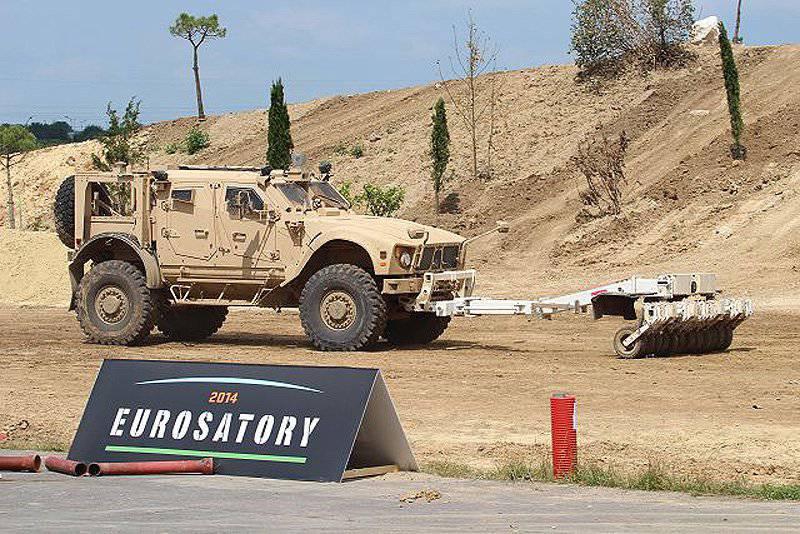
Автомобиль M-ATV с катковым тралом, показанный компанией Oshkosh на выставке Eurosatory 2014, был оборудован роботизированным комплектом Terramax, сенсоры которого видны в нижнем углу картинки


Ближний план установленных на крыше сенсоров робота Terramax, которые обеспечивают четкий обзор того, что впереди него, но при этом возникает вопрос - для чего лобовые стекла такие чистые!
Oshkosh: Среди американских производителей больших транспортных средств лидером в области тяжелых роботизированных машин, конечно, является компания Oshkosh Defense. Она начала разработку роботизированной технологии TerraMax в начале 2000-х по требованию Управления перспективных оборонных исследований Darpa. После нескольких лет разработок и усовершенствований в августе 2012 года Лаборатория боевых действий корпуса морской пехоты США и компания Oshkosh Defense применили технологию TerraMax с целью проверки транспортной колонны, которая состояла из пяти обычных и двух беспилотных машин. Последние двигались в автономном режиме, хотя и под контролем оператора с блоком дистанционного управления. В то время как компания сохраняет свои обязательства перед Управлением военно-морских исследований касательно программы по грузовому роботу, в рамках которой транспортные колонны снабжения получат роботизированные средства с целью максимального исключения контакта с противником, Oshkosh также находится в поисках других приложений для своей постоянно модернизируемой системы TerraMax.
На выставках AUVSI 2014 и Eurosatory 2014 компания Oshkosh представила бронеавтомобиль M-ATV, оборудованный катковым тралом Humanistic Robotics, способным работать в автономном режиме. Динамические характеристики автомобиля были адаптированы к тралу и в следующие пару лет компания Oshkosh продолжит эксперименты в области разминирования маршрутов. Демонстрационный образец, показанный в Париже, был оборудован установленным на крыше лидаром (лазерным локатором). Он рассматривается в качестве основного сенсора и особенно эффективен в условиях высокой запыленности, «помогая» радарам, установленным на каждом углу машины. В свою очередь оптико-электронные сенсоры позволяют оператору получать ясную и четкую визуальную информацию об окружающей обстановке. Модернизация системы в основном заключалась в разработке и установке нового и быстрого компьютера, способного справиться с более высоким разрешением сенсоров, необходимым для улучшенного восприятия окружающей местности, которое включает обнаружение препятствий и подозрительных объектов в пыли или в зелени, что в свою очередь позволяет машине двигаться быстрее (точно также как автомобилист в ночных условиях способен ехать быстрее при свете более мощных фар). Новый комплект имеет открытую архитектуру, которая позволяет без проблем устанавливать в систему TerraMax новые типы сенсоров.
Lockheed Martin: Форт-Худ, 14 января 2014 года. Конвой из четырех машин, двух грузовиков Palletized Loading System, сочлененного грузовика M915 и машины сопровождения Humvee, пересек «ложный город», справившись со всеми типами препятствий, включая локальное дорожное движение, пешеходов и т.д. Что сделало событие исключительным так это то, что за исключением Humvee все машины в колонне были без водителей – буквально. Они были оборудованы дополнительной системой автономной мобильности Autonomous Mobility Appliquе System (Amas), разработанной компанией Lockheed Martin в соответствии с контрактом, полученным в октябре 2012 года. Была поставлена задача по разработке мультиплатформенного комплекта, объединяющего недорогие сенсоры и системы контроля, который мог бы устанавливаться на машины армии и морской пехоты, снижая нагрузку на водителя или обеспечивая полное автоматическое вождение под наблюдением. Для машины сохраняется возможность ручного вождения, но добавляются сенсоры и контрольные функции, которые предупреждают водителя об опасности. По данным военной статистики большая часть аварий в транспортных колоннах вызвана усталостью и потерей концентрации. Amas является частью программы Cast (Convoy Active Safety Technology – технология активной безопасности конвоя), в которой был грамотно использован опыт компании Lockheed Martin, приобретенный с роботом SMSS. Основными сенсорами здесь остаются GPS, лидар и радар плюс система управления, которая обладая неким уровнем искусственного интеллекта, обеспечивает принятие решений. Вторая серия демонстрационных испытаний была завершена в июне 2014 года на полигоне Саванна Ривер министерства энергетики.

Дополнительная Система Автономной Мобильности Autonomous Mobility Appliquе System разработана компанией Lockheed Martin в рамках программы Технология активной безопасности конвоя Convoy Active Safety Technology
В испытаниях приняли участие беспилотная машина-лидер и следовавшая за ней на скорости до 65 км/ч колонна из шести автономных систем, оборудованных системой Amas (в испытаниях также была удвоена длина колонн). Все машины были средними и тяжелыми грузовиками семейства FMTV: один MTVR, два PLS, два тягача M915 и один HET Дальнейшие испытания по безопасности были проведены в июле 2014 года, за которыми последовала демонстрация работоспособности в июле-августе 2014 года.
Mira: Британская компания Mira специализируется на продвинутых транспортных средствах и системах, среди которых есть и робототехника. Компания разработала независящий от платформы комплект Mace (Mira Autonomous Control Equipment – оборудование автономного управления компании Mira), который может быть интегрирован фактически в любую наземную платформу для получения необходимого уровня автономности (дистанционный, полуавтономный и автономный режимы) в зависимости от потребностей заказчика. Mace был установлен на различные машины для того, чтобы показать его потенциальные приложения (решения на базе автомобилей Sherpa и Land Rover для логистической поддержки спешенной пехоты, тогда как автомобиль, оборудованный комплектом наблюдения Guardsman на базе комплекта Mace, работал в качестве платформы 4x4 охраны периметра).

Независимый от платформы роботизированный комплект Mace, разработанный британской компанией Mira, был развернут в Афганистане на автомобилях Land Rover обнаружения направленных фугасов
В настоящее время одним из решений MACE, реализованным на практике, является система «Project Panama», которая работает в качестве беспилотного комплекса проверки и расчистки маршрутов. Система на вооружении находится с 2011 года в Афганистане, она используется для обнаружения бомб и базируется на автомобиле повышенной проходимости Snatch Land Rover (SN2). Машина Panama используется в дистанционном и автономном режимах на дальностях до 20 км с целью обеспечения максимальной безопасности личного состава. В середине июня 2014 года британская армия объявила о том, что Panama останется на вооружении до 2030 года, а компания Mira гарантирует дальнейшее развитие своей технологической платформы MACE. На выставке AUVSI компания Mira показала свои возможности в сфере проверки обочин дорог; после нескольких лет использования лидаров и радаров акцент в новой системе был сделан на обнаружении подозрительных предметов с помощью технического зрения. Это связано не только со стоимостью – система обнаружения с помощью технического зрения стоит на порядок меньше системы на основе лидара – но также потому, что использование дополнительных типов сенсоров позволяет передать дополнительные данные в систему и, следовательно, повышает надежность и точность.
Ruag: Швейцарская компания Ruag Defence также работает над комплектом, который позволяет трансформировать традиционные машины в машины с контролируемой автономностью. Комплект получил название Vero (Vehicle Robotics) и впервые был показан весной 2012 года на борту легкого бронированного автомобиля GDELS Eagle 4. Система была показана на выставке Eurosatory 2014 в режиме дистанционного управления, она способна также следовать по заранее запланированному маршруту, обозначенному последовательными координатами. По сравнению с машиной показанной в 2012 году, которая работала только в режиме дистанционного управления, машина на выставке в Париже имела комплект установленных впереди сенсоров обхода препятствий. Два лидара были установлены слева и справа на бампере (в конечно счете будут перенесены на капот с целью снижения искажений от поднимающейся пыли), а радар установлен был по центру бампера с еще одним устройством справа от него, названным компанией «специальный оптический сенсор».
По данным компании Ruag Defence необходимо провести несколько месяцев испытаний для квалификации программного обеспечения и оборудования. В настоящее время комплект Vero интегрирован еще на две военные машины, модели которых не раскрываются. А в 2015 году система будет установлена на чисто роботизированную платформу массой примерно три тонны, хотя выбор между гусеницами и колесами еще не сделан. Компания Ruag ведет обсуждения с партнерами и еще должна решить, будет ли она устанавливать свою систему Vero на существующую или на специально разработанную платформу.

Роботизированный комплекс Ground Unmanned Support Surrogate был разработан компанией Torc Robotics на базе шасси Polaris MVRS700 6x6

Швейцарская компания Ruag работает над своим комплектом Vero, который в настоящее время установлен на GDELS Eagle 4. Часть сенсоров установлена на крыше, а часть установлена на бампере
Torc Robotics: Эта американская компания, специалист в роботизированных решениях для военной, горнодобывающей, машиностроительной и сельскохозяйственной сфер, в настоящее время работает по программе корпуса морской пехоты по наземному роботу обеспечения Ground Unmanned Support Surrogate (Guss). Компания Torc Robotics участвовала с 2010 года в разработке легкой машины, способной самостоятельно доставлять припасы войскам в боевых условиях, перевозить грузы подразделения морской пехоты или эвакуировать раненых. При помощи роботизированных модулей Torc Robotics трансформировала четыре автомобиля-багги Polaris M VRS700 6x6 в роботизированные средства, способные принять груз около 900 кг.
Модуль AutoNav является ключевым элементом, позволяющим получить роботизированное транспортное средство с тремя различными режимами работы: навигация по заданным точкам, следуй за мной и дистанционный. В роли интерфейса выступает ручное устройство WaySight, которое позволяет оператору выбрать режим работы, а также либо контроль, либо наблюдение за машиной. Затем эта технология была доработана и была перенесена на M1161 Growler, машину, выбранную корпусом морской пехоты для транспортировки внутри конвертоплана V-22 Osprey. Программа известна в настоящее время под аббревиатурой Guss AITV (Autonomous Internally Transportable vehicle – автономная машина перевозимая внутри). Сенсорный комплект включает инерциальную навигационную систему, камеры и лидар. Он был впервые испытан в реальных учениях во время учений Rimpac 2014 на Гавайях в июне, показав свою практическую ценность в операциях по эвакуации раненых и облегчении нагрузки на пехотинцев. После учений была определена необходимость в некоторых технологических усовершенствованиях. Дополнительная модульная система компании была также использована для разработки комплекта Robotic Assault Zone Terminal Evaluation Kit, способного проводить оценку потенциальных неоднородностью грунта на взлетно-посадочных полос с целью снижения риска для специальных групп маркшейдеров, инспектирующих взлетно-посадочные полосы аэродромов. В комплекте используются многие технологии, разработанные для робоавтомобиля Guss, а устанавливается он на автомобиль Polaris LTATV, оборудованный пробоотборником грунта Mosquito от MDA.

Роботизированный автомобиль Polaris LTATV, оборудованный комплектом Robotic Assault Zone Terminal Evaluation Kit с пробоотборником грунта Mosquito от MDA (справа в рабочем положении)
Автомобили Polaris недавно были выбраны Управлением перспективных оборонных исследований Darpa для участия в соревновании Robotics Challenge с моделированием сценариев оказания помощи при бедствиях различного происхождения. На автомобили Polaris Ranger XP 900 EPS, которые должны были служить в качестве средства передвижения для водителей-роботов, были установлены роботизированные комплекты, а также реализована технология дистанционного управления SafeStop Electronic Throttle Kill and Brake Actuation (электронное управление дроссельной заслонкой и тормозами), что позволило обеспечить мобильность автомобилей на полигоне моделирования природных и техногенных катастроф. На платформе грузоподъемностью 453 кг была установлена система энергоснабжения робота, а внутри кабины скамья и рулевая колонка с регулируемым наклоном с целью обеспечения достаточного пространства для работы роботов с машиной.

Polaris Defense все больше раздумывает о «роботизации» при создании своих машин. Ее Ranger XP 900 EPS был выбран Darpa для участия в соревновании роботизированных платформ, моделирующих операцию по ликвидации последствий катастроф

Torc Robotics использовала опыт, полученный в программе Guss, для роботизации автомобиля M1161, перевозимого в конвертоплане Osprey. Созданная в итоге система Guss AITV была продемонстрирована на учениях Rimpac 2014

Kairos Pronto4 Uomo представляет собой дополнительный комплект, который очень напоминает функциональность человека. Его можно установить всего за несколько минут в кабину стандартного, управляемого человеком транспортного средства
Kairos Autonomi: Почему бы не заменить водителя механической конструкцией, имитирующей строение человеческого тела? Инженеры компании Kairos Autonomi последовали по этому пути, создав дополнительный комплект роботизации Pronto4 Uomo, который может быть установлен на стандартную машину за десять минут с целью обеспечения дистанционного управления и управления по координатам GPS. Система была показан в 2013 году, она весит всего 25 кг и складывается в чемодан. Металлическая конструкция моделирует движения человека, две «ноги» нажимают на педали тормоза и газа, а «рука» на универсальных шарнирах поворачивает рулевое колесо. Система может работать от стандартной военной батареи BA5590 и поскольку подключение к бортовой сети самой машины не требуется, это сокращает время установки комплекта.
В каталоге Kairos Autonomi также имеется более традиционный дополнительный комплект Pronto 4. Эта модульная система может роботизировать обычную машину, дав ей различный уровень автоматизации, варьирующийся от дистанционного управления до полуавтономности. Установка комплекта занимает менее четырех часов. комплект Pronto 4 – это несколько модулей среди роль «мозга» выполняет компьютерный модуль, интерфейсные же модули (рулевое колесо, исполнительные механизмы для тормоза, газа и переключения передач) позволяют соединить его с машиной. Система доступна в различных конфигурациях, общая масса составляет около 10 кг.
Selex ES: Эта компания прибегла к помощи миланской фирмы Hi-Tec в своей работе по снижению рисков для патрульных групп за счет роботизации транспортных средств (где возможно), особенно роботизации машин менее защищенных и, следовательно, более дешевых. Для разработанной системы, получившей обозначение Acme (Automated Computerised Mobility Equipment – автоматизированное компьютеризированное оборудование обеспечения мобильности) компания Hi-Tec предоставляет исполнительные механизмы, системы навигации, обработку данных и программное обеспечение, тогда как Selex поставляет инфракрасные и дневные системы технического зрения с узким и круговым (на 360°) полями зрения, инфракрасную подсветку, системный анализ сенсорных данных и тренажеры.
Компания Selex ES в настоящее время утвердила окончательную конфигурацию, финальный прототип ожидается осенью 2014 года. Нынешняя система Acme, которая полностью свободна от ограничений Правил международной торговли оружием, должна быть готова к серийному производству в начале 2015 года. Selex ES уже ведет переговоры со многими потенциальными заказчиками. Интерфейс и система для вождения устанавливаются за полчаса-час. Вариант рулевой системы из углеволокна весит 7 кг в противоположность своему стальной аналогу массой 12 кг. Шаговый электродвигатель с моментом 28 Нм обеспечивает скорости вращения от 18 до 180 об/мин. Навигационные датчики включают помехоустойчивую GPS от QinetiQ Canada с двумя антеннами, работающими на семи диапазонах частот (Acme совместима с Galileo и ГЛОНАСС), а также полупроводниковый блок инерциальных измерений с отклонением 0,5% в час (этот блок используются при потере сигнала GPS, обычно на короткое время). Установленный на крыше лазерный сканер обеспечивает обход препятствий. Масса системы составляет 60 кг, в автоматическом режиме максимальная скорость составляет 40 км/ч, а в дистанционном режиме компания не советует превышать 100 км/ч. Хотя надо заметить, что система Acme должна всегда оставаться под наблюдением оператора. Она способна повторить заранее предопределенный маршрут с точностью до двух сантиметров при отклонениях в скорости до 0,5 км/ч. Шаговый двигатель дроссельной заслонки обеспечивает усилие 14 кг со скоростью 300 мм/с. Пневматическая система используется для приводов муфты и тормоза, обеспечивая усилие 60 кг со скоростью 300 мм/с. Для системы Acme могут быть использованы новые геореференсные карты (с привязкой к местности). Была разработана упрочненная кнопочная консоль управления, поскольку в компании Selex ES решили двигаться к системам управления игрового типа, которые более привычны для молодых солдат. Selex ES в настоящее время работает над программой по «сшиванию» изображений с целью получения кругового обзора, который, в конечном счете (возможно к концу 2015 года), будет реализован в 3D шлеме, предназначенном для дистанционного вождения.

Система Acme Automated Computerised Mobility Equipment (Автоматизированное компьютеризированное оборудование обеспечения мобильности) от компании Selex ES недавно была модернизирована новыми сенсорами. Компания также работает над разработкой новых человеко-машинных интерфейсов
Oto Melara: Итальянская компания Oto Melara предлагает дополнительную систему, которая первоначально разрабатывалась для гражданских целей. Комплект дистанционного управления включает несколько исполнительных элементов, способных двигать рулевое колесо, педали и другие средства управления. Система может устанавливаться и сниматься примерно за один час, но компания Oto Melara в настоящее время работает над новыми системами в ответ на потребности «умной транспортной колонны».

Израильская компания G-Nius опираясь на богатый опыт, полученный с серией роботов Guardium, разработала роботизированный комплект, который позволяет трансформировать наземную платформу в беспилотную систему, «мозг» которой представлен на фото
G-Nius: Кроме роботизированных машин, описанных выше, израильская компания G-Nius разработала новый робототехнический комплект, который позволяет превратить любую наземную платформу в беспилотную систему с очевидными механическими вариациями с целью адаптации к конкретной машине. Если предыдущая система G-Nius состояла из множества черных ящиков, новое изделие состоит из одного ящика, в состав которого входят функциональный компьютер, навигационный блок, видео-аудио система и блок распределения электроэнергии.
Стандартные сенсоры включают дневную/ночную неохлаждаемую тепловизионную камеру, задние и боковые камеры и систему связи, также может быть добавлена система объезда препятствий. Система позволяет работать в четырех режимах разного уровня автономности. В прямой видимости работа гарантирована на расстоянии 20 км, но для больших дистанций может быть добавлена спутниковая связь. Новый комплект роботизации не зависит от подключаемого оборудования, и таким образом, все типы устройств, от разведывательных систем и глушителей и до вооружения могут быть подсоединены к комплекту. Компания G-Nius предлагает свой комплект для различных типов платформ, от легких колесных автомобилей до гусеничных боевых машин пехоты.
Использованы материалы:
www.otomelara.it
www.hdtglobal.com
www.nexter-group.fr
www.irobot.com
www.reconrobotics.com
www.novatiq.com
www.oshkosh.com
www.lockheedmartin.com
www.mira.co.uk
www.ruag.com
www.torcrobotics.com
www.kairosautonomi.com
www.selex-es.com
www.g-nius.co.il
Информация