Роботы производства DFKI
На сегодняшний день ученые из Центра робототехнических инноваций (Robotics Innovation Center) DFKI занимаются разработкой очень интересных проектов. Над большинством из таких разработок специалисты работают вместе с исследователями робототехнической группы (Robotics Group), которая существует на базе Бременского университета. Задачей этих групп исследователей стоит реализация в самых различных сферах жизнедеятельности современного человечества результатов их практических и теоретических исследований в области робототехники. Однако самой большой задачей, над которой работают ученые, является использование робототехники в сфере изучения космоса.
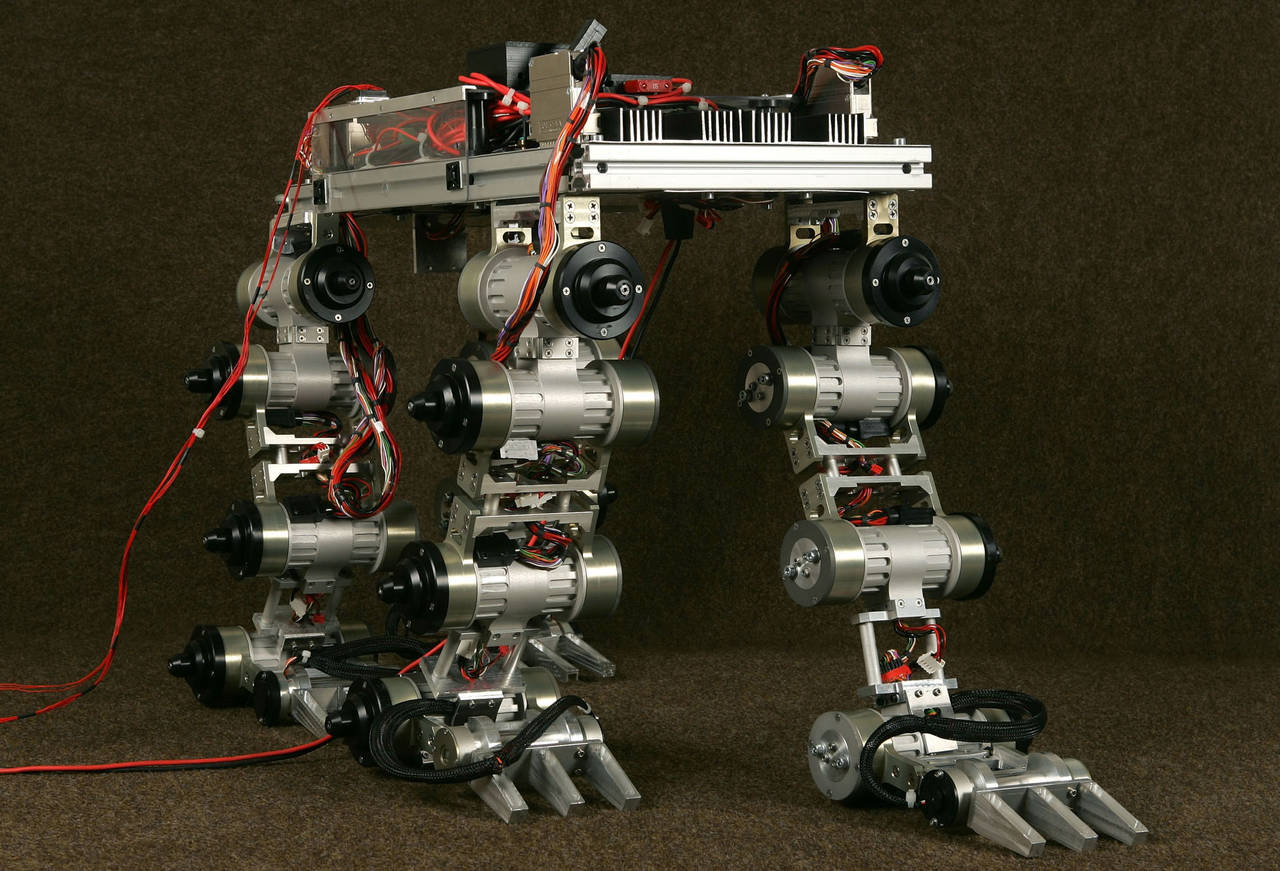
Один из основных роботов, над которым до недавнего времени работали эти группы исследователей, – это робот ARAMIES. Он предназначался для исследовательской работы на пересеченной местности, крутых склонах, что могли бы встретиться на его пути по поверхности Марса или Луны. Внешне по строению своего корпуса этот робот похож чем-то на собаку и значительно всем своим видом напоминает AMES (робота из фантастического кинофильма «Красная планета»/«Red Planet»). Работы по созданию робота ARAMIES начались в 2004 году в ходе реализации проекта DFKI, который бал заказан Немецким космическим агентством DLR.
Конечно, при создании двигательной системы робота, основой которого являются ноги, возникают определенные сложности. Впрочем, эта система уже хорошо себя зарекомендовала и доказала ряд своих преимуществ благодаря дополнительной подвижности. Наглядным примером такой двигательной системы нам могут послужить роботы BigDog.

К сожалению, проект ARAMIES быстро закончился, не успев, как говорят, начаться. Свернули работы над этим проектом уже в 2007 году. Однако самые значимые элементы конструкции и огромная толика программного обеспечения «по наследству» достались другому исследовательскому роботу SpaceClimber, который беспрепятственно передвигается по хребтам и изломам лунных кратеров.
Информация