Проект безэкипажного катера противолодочной обороны ACTUV (США)
Развитие подводных лодок предъявляет особые требования к противолодочным системам. Новые комплексы, предназначенные для поиска субмарин противника, должны иметь ряд особых характеристик, которые позволят эффективно выполнять поставленные задачи. Одним из многообещающих нововведений в этой сфере является использование систем дистанционного управления или полностью автономных машин. Ожидается, что безэкипажные катера противолодочной обороны смогут значительно улучшить потенциал флотов в деле борьбы с подлодками противника.
С начала 2010 года агентство DARPA и ряд смежных организаций занимаются разработкой проекта перспективной противолодочной системы, построенной с использованием безэкипажных катеров. Подобная техника должна будет нести набор специального оборудования и вести патрулирование заданных акваторий. В случае обнаружения подозрительных объектов информация о них должна передаваться на пульт управления, а затем – комплексам противолодочной обороны, отвечающим за уничтожение подлодок. Ожидается, что все работы будут завершены до конца текущего десятилетия, а первые безэкипажные катера новой модели и набор другого оборудования будут переданы ВМС США уже в 2018 году.
Разработка перспективного противолодочного комплекса ведется в рамках программы ACTUV (ASW Continuous Trail Unmanned Vessel – «Беспилотное средство ПЛО для длительной работы»). Основной целью этого проекта является создание и проверка безэкипажного катера, пригодного для выполнения поисковых задач в течение длительного времени. Главной предпосылкой к этому являются серьезные ограничения, имеющиеся у кораблей и подлодок «традиционной» конструкции. Ожидается, что отсутствие экипажа и автоматизация всех процессов позволит избавиться от недостатков, присущих «обитаемой» технике.
Главными требованиями к комплексу ACTUV являются максимально возможная дальность плавания и возможность длительного патрулирования в заданном районе. Безэкипажный катер со специальным оборудованием должен преодолевать на одной заправке топливом несколько тысяч морских миль и сохранять работоспособность в течение нескольких недель или месяцев. Катер должен работать как в полностью автономном режиме, так и по командам оператора.
Изначально программа ACTUV разделялась на четыре этапа, в ходе которых планировалось проводить различные работы. Так, до середины 2012 года предполагалось провести все необходимые предварительные исследования, а затем сформировать точный технический облик перспективного противолодочного комплекса. С середины 2012-го должны были начаться 2 3 и 4 этапы. Целью второго этапа была разработка проекта, третьего – строительство катеров-прототипов и сопутствующего оборудования, четвертого – испытания и доводка прототипов комплекса. Начало четвертого этапа планировалось на середину 2015 года.

Формирование облика перспективного комплекса ПЛО ACTUV завершилось летом 2012 года. В середине августа агентство DARPA подписало контракт с компанией Science Applications International Corporation или SAIC (ныне Leidos Holdings). В соответствии с этим соглашением SAIC/Leidos должна реализовать второй, третий и четвертый этапы программы ACTUV. За выполнение работ компания получит 58 млн долларов.
Тогда же были раскрыты некоторые подробности требований к новой противолодочной системе, а также особенности предложения компании SAIC. Перспективный комплекс должен иметь набор оборудования, пригодный для поиска подлодок различных типов, в том числе современных неатомных, которые имеют некоторые средства для снижения шумности и других факторов заметности. Безэкипажный катер должен продолжать дежурство в течение 60-90 дней. Основную массу работы комплекс должен вести самостоятельно. Оператор будет привлекаться к выполнению задач только в некоторых случаях.
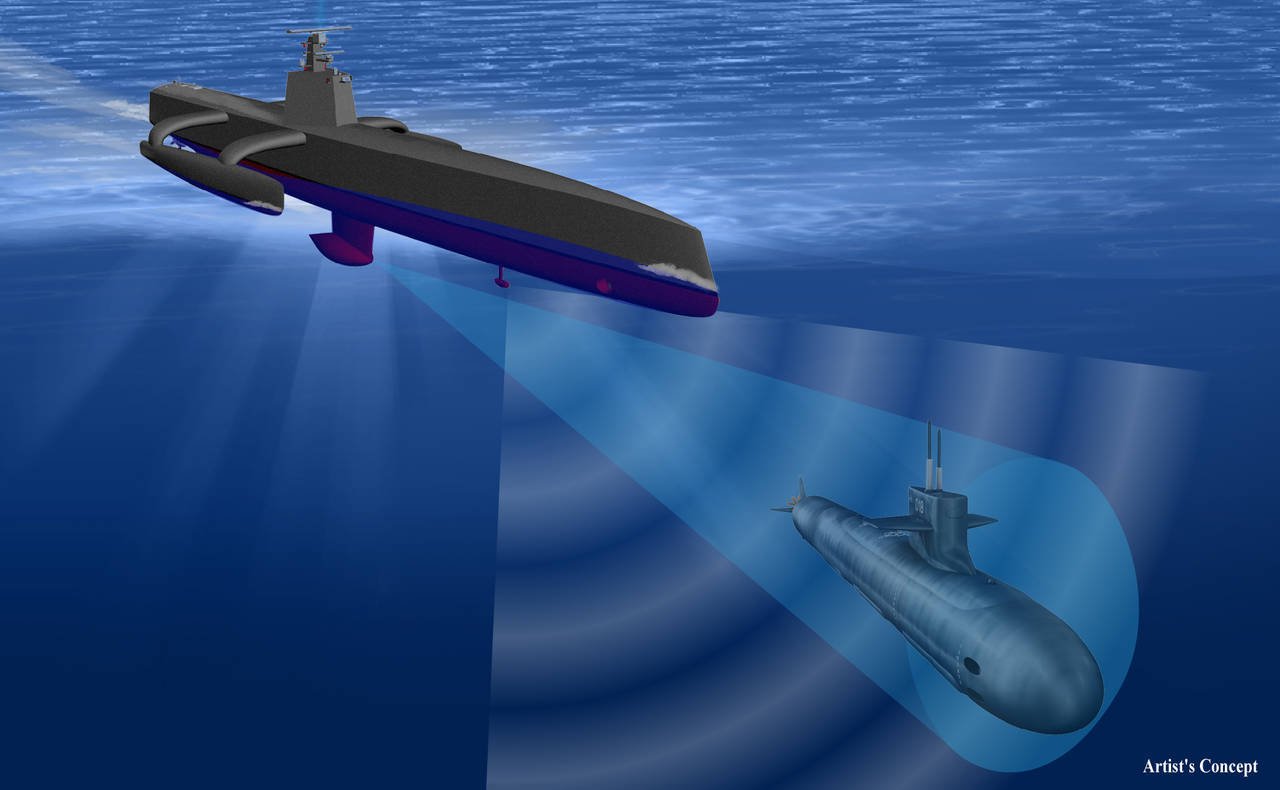
Компания SAIC предложила использовать в составе комплекса ACTUV гидроакустическую станцию, оптико-электронную систему с тепловизионным каналом, радиолокационную станцию и ряд других систем. Подобный набор аппаратуры, как ожидается, позволит катеру ACTUV следить за акваториями и засекать подлодки вероятного противника. С целью повышения характеристик перспективный катер предлагается строить по схеме «тримаран». Подобная архитектура корпуса должна обеспечить оптимальное соотношение различных характеристик.
Основной целью комплекса ACTUV должны стать дизель-электрические и неатомные подлодки противника. В таком случае важным преимуществом комплекса станет возможность длительного пребывания в заданном районе. ДЭПЛ нуждаются в регулярных всплытиях для подзарядки аккумуляторов, что должно в некоторой мере облегчить их обнаружение. Таким образом, набор специального оборудования позволит безэкипажному катеру искать подлодки как под водой, так и после всплытия. В случае с неатомными субмаринами, оснащенными воздухонезависимой силовой установкой, комплекс ACTUV должен будет использовать в основном гидроакустическую станцию и иные средства обнаружения подводных объектов.
При разработке проекта ACTUV учитывалась необходимость снижения заметности самих противолодочных катеров. Эта техника должна не только находить подлодки противника, но и оставаться невидимой для них. В противном случае безэкипажный катер может быть уничтожен до того, как успеет передать точную информацию о местоположении найденной подлодки. С этой целью в проекте применены некоторые стелс-технологии. Катера должны иметь специальную форму, образованную множеством плоских поверхностей, корпуса будут изготавливаться из малозаметных для РЛС материалов и т.д.
Особые требования предъявлялись к системам связи. Большую часть времени аппараты ACTUV должны работать на большом удалении от баз в автоматическом режиме. В ряде ситуаций в работе комплекса должен принимать участие оператор. По этой причине перспективная противолодочная система нуждается в двухсторонней связи, пригодной для передачи различной информации, команд и видеосигнала. Кроме того, она должна быть защищена от помех систем радиоэлектронной борьбы противника. Также необходимо учитывать тот факт, что ведущий передачу катер может быть обнаружен средствами радиотехнической разведки.
Компании SAIC было поручено разработать перспективный комплекс ПЛО, соответствующий предъявляемым требованиям. Помимо требований, касавшихся характеристик и возможности этой техники, заказчиком задавались некоторые ограничения по стоимости системы. Один безэкипажный катер, по требованию DARPA, должен стоить около 20 млн долларов.
В марте 2013 года стало известно, что в разработке проекта ACTUV примет участие компания Raytheon. Головной подрядчик в лице SAIC заказал этой организации создание новой гидроакустической станции, которая в дальнейшем должна будет стать основным средством выполнения боевых задач. Гидроакустическая система MS3, по требованию заказчика, должна иметь активный и пассивный режим работы и полностью размещаться в корпусе катера. Станция должна находить подлодки, торпеды и различные малоразмерные подводные объекты.
Немного позже было объявлено о подписании соглашения между компаниями SAIC и OpenClovis Solutions, Inc. Последняя занимается разработкой систем управления для различной техники. В рамках проекта ACTUV компания OpenClovis Solutions, Inc. отвечает за создание нового варианта платформы SAFPlus. По имеющимся данным, такая система будет управлять взаимодействием нескольких безэкипажных катеров ACTUV при совместной работе в автоматическом режиме.
В 2013 году в компании SAIC произошли некоторые изменения. Самое заметное – смена названия. Под новым именем, Leidos, компания продолжила работы по программе ACTUV. Летом 2014 года специалисты компании завершили проектирование перспективной противолодочной системы и представили проект заказчику. В начале июля было объявлено о скором начале строительства опытного катера и набора сопутствующей аппаратуры. На строительство опытного катера отводилось 15 месяцев.
Параллельно со строительством катера-прототипа компания Leidos занялась испытаниями демонстратора технологий. Экспериментальный катер длиной 32 фута (9,7 м) был оснащен набором датчиков и аппаратурой управления. Бортовое оборудование катера-демонстратора технологий могло работать в автономном режиме или выполнять команды оператора. Любопытно, что в ходе испытаний уменьшенного прототипа изучались не только особенности дистанционного и автономного управления. Отдельно изучались возможности автоматики по соблюдению Международных правил предупреждения столкновений судов на море. Отсутствие экипажа не является поводом для несоблюдения международных норм и правил. Перспективные катера ACTUV должны соблюдать правила судовождения. Помимо демонстратора технологий в таких испытаниях использовался еще один катер, имитировавший судно, с которым нужно разойтись.
В ноябре прошлого года завершились испытания первого упрощенного катера-прототипа, оснащенного только системами управления. За 42 дня специалисты провели около 26 тыс. тестов, в ходе которых катер проходил различные трассы, преодолевал узкие каналы и расходился с другими судами на разных курсах. Использованная автоматика управления показала свои возможности. В ходе испытаний и доводки удалось «научить» автоматику катера правильному вождению.
В начале этого года стартовали новые испытания. На этот раз платформой для строительства прототипа стал 42-футовый катер. В середине января состоялся один из самых интересных этапов испытаний. Опытный катер самостоятельно преодолел путь длиной около 35 морских миль, пройдя от Галфпорта до Паскагулы (штат Миссисипи). В ходе этого плавания катер самостоятельно определял свое местоположение и необходимый маршрут движения. Кроме того, автоматика в соответствии со всеми существующими правилами избегала столкновения с другими судами и иными объектами.
К настоящему времени полностью определен общий облик и состав оборудования перспективного противолодочного катера. Кроме того, основное техническое средство комплекса ACTUV получило собственное имя – Sea Hunter («Морской охотник»). Большая часть информации об этом катере, в частности точный состав целевой аппаратуры, пока остается засекреченной. Тем не менее, уже были опубликованы некоторые данные.
Катер ACTUV Sea Hunter будет иметь вытянутый корпус длиной 130 футов (около 40 м). Для снижения радиолокационной заметности корпус будет иметь форму, образованную несколькими прямолинейными панелями. Большая часть оборудования будет располагаться внутри корпуса. Часть аппаратуры должна быть вынесена на небольшой надстройке. Она будет иметь небольшие размеры и форму, образованную несколькими плоскостями. Для повышения мореходных качеств катер является тримараном с небольшими бортовыми аутригерами, установленными на горизонтальных балках. Ожидается, что такая конструкция позволит сохранить приемлемые характеристики при наличии достаточно длинного и узкого корпуса.
На надстройке катера будет размещаться аппаратура для наблюдения за надводной обстановкой. Для этого планируется использовать оптико-электронную систему с видеокамерой и тепловизором, а также, возможно, радиолокационную станцию. В подводной части корпуса должны располагаться антенны гидроакустической станции. Собственно станция MS3 должна иметь два режима работы: пассивный и активный. В первом она будет только принимать сигналы, во втором – работать по принципу сонара.
Характеристики «Морского охотника» пока не оглашались. Известно только то, что такой катер сможет вести патрулирование в течение 60-90 суток и преодолевать свыше 3300 морских миль без дозаправки и обслуживания. Можно предположить, что во время патрулирования противолодочный катер будет двигаться со скоростью не более 5-7 узлов. Это позволит увеличить дальность плавания и продолжительность патрулирования за счет экономии топлива, а также не мешать работе гидроакустической станции шумом собственных винтов.
По некоторым данным, автоматика противолодочного катера будет управлять всеми процессами, а также делать часть работы за оператора комплекса. В частности, она сможет анализировать шум обнаруженной подлодки и определять ее тип, выдавая на пульт не только координаты обнаруженной цели, но и прочие ее параметры. Таким образом, участие оператора в работе комплекса можно будет сократить до необходимого минимума.
В настоящее время компания Leidos завершает строительство опытного катера ACTUV Sea Hunter. Испытания этого прототипа должны стартовать летом 2015 года. Поскольку работа некоторых систем уже была изучена с использованием предыдущих прототипов, основной задачей испытателей станет отработка и проверка целевого оборудования – гидроакустической станции, средств связи и т.д. На проведение четвертого этапа, в ходе которого планируется провести испытания и доводку прототипа полноценного противолодочного катера, отводится несколько лет. Первые серийные ACTUV Sea Hunter планируется построить и передать военно-морским силам в 2018 году.
По материалам сайтов:
http://darpa.mil/
http://navaldrones.com/
http://defense-update.com/
http://globalsecurity.org/
https://leidos.com/
Информация