Мир завтрашнего дня: военные роботы на перепутье
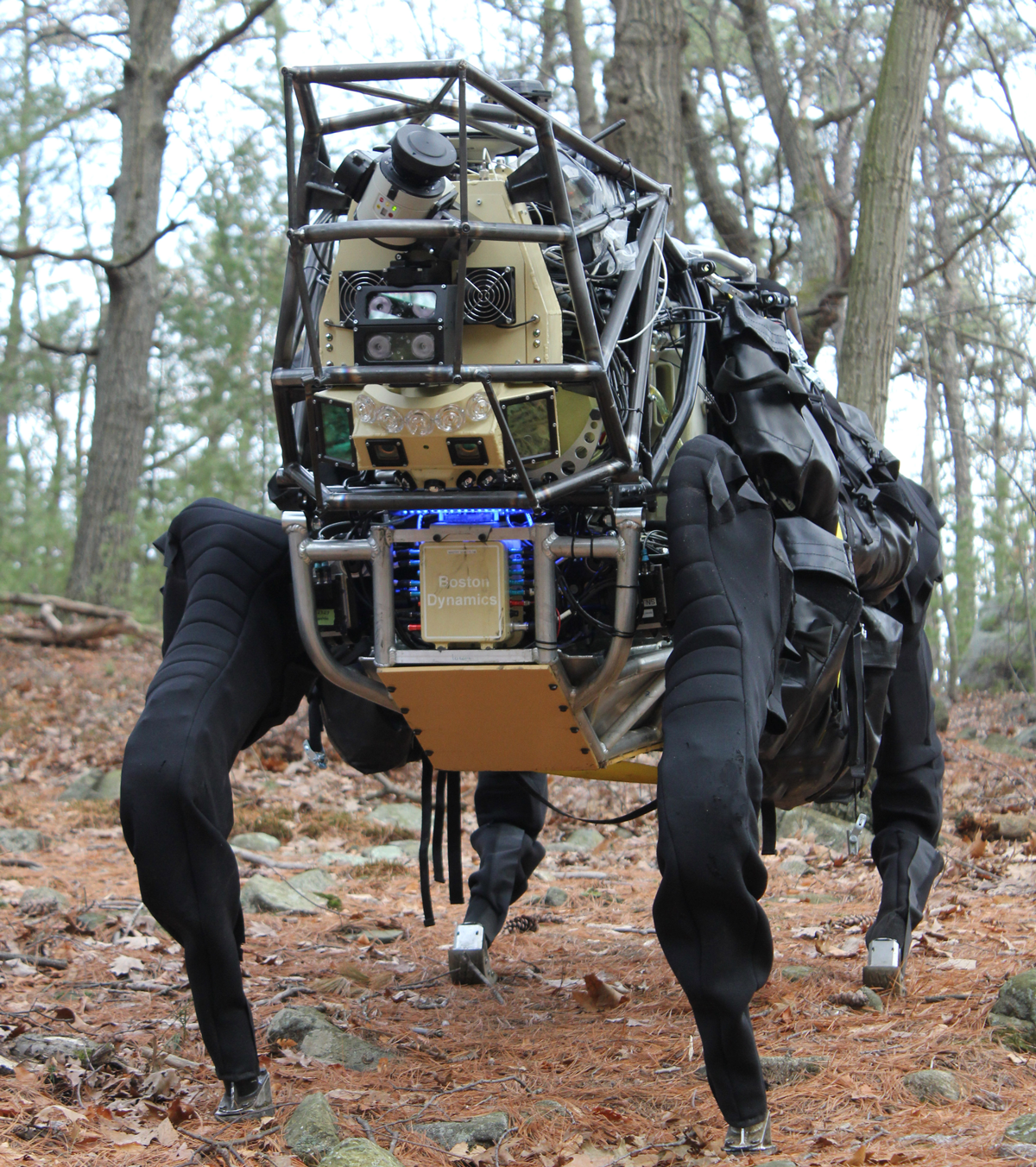
Робот LS3 представляет собой новый подход к проблеме обеспечения мобильности и способности систем сопровождать развернутые подразделения
Полезность автоматических наземных аппаратов (АНА) во всем спектре боевых задач сегодня уже не вызывает никаких сомнений. Недавние боевые операции послужили в качестве испытательных полигонов для ряда систем и выявили силу и слабость военных роботов. Рассмотрим ряд существующих программ и возможности, которые они дадут.
После нескольких лет интенсивной эксплуатации автоматические наземные аппараты благожелательно были приняты пользователями и военным командованием, но в настоящее время направление развития этих возможностей находится в переломной точке, поскольку развернутые ныне системы выведены с театра военных действий и определены будущие требования.
Вооруженные силы стоят перед трудным выбором: им необходимо определить, какие из существующих систем необходимо оставить, что более не нужно, где необходимы возможности для роста в краткосрочной перспективе и как они планируют разрабатывать роботизированные системы следующего поколения, которые обещают качественное изменение своих возможностей.
Американские военные на сегодня имеют на вооружении наибольшее число АНА самых разных типов и поэтому понятно, что многие армии мира и промышленность пристально наблюдают за их планами.
Впрочем, первая проблема, которую должны решить все рода ВС США, заключается в том, как поступить с развернутыми в настоящее время платформами многие из которых были закуплены по программам срочного финансирования, например по срочному совместному предписанию, а не в соответствии с официальными планами.
«У нас много роботов, которые мы закупали в течение нескольких лет, находятся в состоянии, которые мы называем «работа от случая к случаю», – пояснил подполковник Аарон Роберсон, руководитель проектов по крупным беспилотным аппаратам в Управлении по разработке совместных проектов роботизированных систем (RSJPO). – Мы не знаем, что делать с ними, мы призываем армию принять решение, поскольку средств на их поддержку не будет».
Оперативные потребности в системах привели к тому, что покупались и развертывались совершенно разнотипные аппараты. Если такой подход соответствовал потребностям того времени, то в настоящее время он представляет собой значительную проблему в форме нестандартных систем. Роберсон заметил далее, что военные собираются решать, что с ними делать и к такому решению нужно относиться всерьез: «Если мы решим избавиться от них, то необходимо понять, что после того как мы начнем процесс, эти системы уже будет не восстановить, поскольку мы собираемся избавиться не только от самих систем, но и от всех их частей и всего того, что мы имели для их обслуживания в течение нескольких лет».
Среди многих АНА, используемых американскими военными, имеются различные модификации семейств Talon производства OinetiQ North America и PackBot производства iRobot, забрасываемых аппаратов, система дистанционной нейтрализации боеприпасов RONS, а также M160. Такое разнообразие ставит перед американскими военными одну из самых больших проблем – небольшая избыточность в инфраструктуре управления и обеспечения. Необходимость ухода от патентованных систем и внедрения открытой архитектуры красной строкой проходит в нескольких инициативах. Особенно это касается программы IOP (Interoperability Profile – параметры взаимодействия) армии США и программы ВМС США по продвинутой роботизированной системе обезвреживания взрывоопасных предметов AEODRS, имеющей приоритетное финансирование.


Робот для дистанционной нейтрализации боеприпасов RONS
Целью программы AEODRS является получение возможностей следующего поколения за счет разработки семейства аппаратов, состоящего из трех вариантов: Increment 1 – носимая система для спешенных операций массой менее 15,9 кг, ведет разведку и оценку угроз на дистанции 100 метров и имеет ограниченные возможности инспекции и обезвреживания; Increment 2 массой до 66 кг для тактических операций, переносится двумя людьми, способен проводить разведку и обнаруживать угрозы на дистанции 1 км; и Increment 3 – возимая на прицепе система массой до 300 кг, способная поднимать тяжелые предметы. Если варианты Increment 2 и 3 предназначены для замены действующих систем, то вариант Increment 1 предназначен для заполнения технологической бреши.
По словам руководителя направления роботизации в Центре разработки надводного вооружения ВМС Майкла Дель Синьоре программа AEODRS предназначена для снятия ряда ограничений, которые были обнаружены у эксплуатируемых платформ. «Эти системы построены на разных закрытых архитектурах, как следствие отдельные блоки управления оператора, отдельные каналы снабжения и очень сложный и громоздкий процесс модернизации».
Ее целью также является решение таких проблем как ограниченная автономность, дистанционный контроль, ограниченные двигательные возможности и степени свободы манипуляторов; недостаточная ситуационная осведомленность; низкая глубина восприятия бортовых камер; и проблемы с дальностью связи и пропускной способностью канала.
Последнее вызывает особую озабоченность: «Коммуникационная система имеет более или менее приличную дальность..., но ширина канала ограничена и поэтому некоторые из продвинутых возможностей, которые мы хотим интегрировать, например автономность или способность предоставлять объемные данные, вы не сможете получить при нынешней полосе пропускания».
Дель Синьоре пояснил, что программа AEODRS будет стремиться решить эти проблемы за счет внедрения общей архитектуры для всего семейства систем. Каждый вариант разбит на модули и интерфейсы между ними определяются общей, контролируемой государством архитектурой, которая будет устанавливать и обеспечивать физические, электрические и логические (взятые из стандарта объединенной архитектуры для беспилотных систем Joint Architecture for Unmanned Systems [JAUS]/SAE AS-4 Standard) интерфейсы, требования к характеристикам модулей наряду с информацией по внедрению.
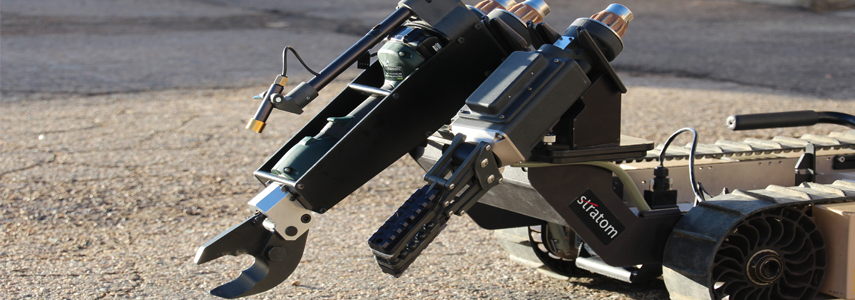

ToolChanger разработки компании Stratom может принять пять разных инструментов и обеспечивает их автоматическую замену
Впрочем, AEODRS – это не вещь «в себе», она создается для взаимодействия с другими системами. «Программы AEODRS и IOP тесно переплетены друг с другом и здесь лучше всего подойдет такое определение, что AEODRS реально является конкретизацией инициативы IOP. Архитектура AEODRS на 95% совместима с IOP и мы теперь работаем над согласованием направлений, которые не совместимы на 100%».
В варианты Increment 1 и 2 будут внедрены более продвинутые возможности, включая манипуляционные способности, необходимые для решения задач, требующих выполнения задачи двумя руками, навигацию по промежуточным точкам, самостоятельные манипуляции, способность создавать 2D и 3D карты в движении, самостоятельную смену инструмента из бортового контейнера и увеличенное до 12 часов время работы.
«В итоге мы сможем дать нашим пользователям технологии гораздо быстрее. Потому что мы считаем, что это позволит большему числу «игроков» оставаться в игре. Небольшие робототехнические компании теперь смогут получить доступ к открытой архитектуре. Мы хотим дать промышленности отладочную модель, тогда они смогут разработать модули на основе этой модели, прийти и продемонстрировать эту технологию нам. Если это то, что нужно, она без труда будет интегрирована в наши системы».
Ряд систем, которые потенциально могут соответствовать некоторым из требований, определенных AEODRS, уже находятся в разработке, хотя они могут и не войти конкретно в AEODRS. Рука-манипулятор Adroit от HDT Robotics была собрана с 16 степенями свободы, из которых 10 имеют привод и 6 (шарниры дальних пальцев) приводятся в действие через дифференциалы. Рука Adroit весит менее 9 кг, может поднять 22 кг, а каждый шарнир может вращаться быстрее 120° в секунду.
Манипулятор DADM (Dual Armed Dexterous Manipulator – двухзахватный ловкий манипулятор) разработки компании Northrop Grumman – также известный как Лобстер – разрабатывается в сотрудничестве с калифорнийской фирмой Applied Minds. DADM позволяет широко использовать коммерческие готовые компоненты, а вся система состоит из двух основных элементов: платформы DADM и контроллера оператора.
Манипулятор отличается двумя присоединенными к общему корпусу захватными устройствами, каждое с 8 степенями свободы, имеющими очень гибкие возможности. Конфигурация почти соответствует размерам и движениям человека, тогда как манипуляторы предназначены для выполнения высокоточных задач, например расстегивание молнии на мешке или резка небольших проволочек. Блок управления имеет подобным же образом сконфигурированный комплект рукояток оператора, чьи движения и вводимые данные копируют манипуляторы. Необходимо отметить, для поддержания высокого уровня манипуляционных возможностей и выполнения высокоточных операций, для которых DADM собственно и предназначен, на наголовный дисплей оператора выводится 3-D видеопоток. Он обеспечивается стереокамерой высокого разрешения и дает глубину восприятия, необходимую для выполнения точных манипуляционных задач.
Компания Northrop Grumman для роботизированных систем также изготовила два контейнера для инструментов. Система Cutlass британской армии имеет контейнер, который может вместить три разных набора для роботизированной руки. Система способна автоматически менять эти наборы без какого-либо сигнала от оператора, что исключает необходимость возвращения аппарата к пользователю для смены рабочего органа.
Компания iRobot разработала подобную систему в сотрудничестве с Stratom. Комплект ToolChanger позволяет размещать на аппарате PackBot различные рабочие органы и автоматически менять их без вмешательства оператора. В подвеске, установленной в задней части, аппарата размещается до пяти инструментов; типичный набор включает кусачки для проволоки, грабли, устройства подрыва и манипуляторы. Соединительная головка для инструментов встроена в руку робота.
Инициатива IOP, как и программа AEODRS, нацелена в основном на унифицированность. Специалист в компании Joint Ground Robotics Enterprise пояснил, что в рамках IOP предусматривается дальнейшее согласование её со стандартом, совместимым с натовскими стандартами STANAG и американскими промышленными стандартами и стандартами министерства обороны MIL-SPEC. Кроме того, будут разработаны военные протоколы связи для небольших автоматизированных систем, а также будет проведено исследование стандартов интерфейсов общей архитектуры управления для подобных систем.
IOP и AEODRS – это не единственная деятельность по внедрению открытых архитектур и стандартизации. Израильская компания G-NIUS отработала технологию, разработанную для своей линейки АНА Guardium и AvantGuard, и взамен 12 «ящиков», использовавшихся до этого, интегрировала роботизированные элементы в единый блок. Этот основной блок может быть интегрирован в любую наземную машину, что позволяет после некоторой доработки превратить ее в АНА. Компания G-NIUS продемонстрировала свои возможности по переделке самых разных платформ в безэкипажную конфигурацию. На сегодня это бронемашины БМП, М113 и Stryker, HMMWV, грузовик Ford F-350 и квадроцикл.
Тем временем, турецкая компания Aselsan разработала семейство АНА, имеющих общую базовую платформу. Модульная система Kaplan (тигр) с открытой архитектурой способна принять различные комплекты оборудования. Это в основном системы наблюдения и разведки, системы борьбы с самодельными взрывными устройствами, но также возможны и вооруженные конфигурации.
Поскольку армия является крупнейшим пользователем АНА в США, то возможно у нее впереди самые большие проблемы в определении своих потребностей и путей направления своих ресурсов.
Армия разбила свои потребности в платформах на четыре категории: носимые, возимые, самоходные и добавляемые модули. Там также рассчитывают на разработку универсального контроллера для беспилотных средств на уровне батальона и ниже, включая небольшие беспилотные авиационные комплексы.
Руководитель подразделения в Soldier Systems and Unmanned Ground Systems подполковник Стюарт Хэтфилд пояснил, что армия запланировала долгосрочные потребности вперед на 30 лет для того, чтобы гарантировано заканчивать все проекты, разрабатываемые в рамках пятилетних бюджетов.
Стратегическое видение армии в этом вопросе предусматривает создание модернизированных сил, состоящих из укомплектованных людьми и аппаратами групп с улучшенной защитой, боевой устойчивостью и живучестью. Также это позволит снизить физическую и когнитивную нагрузку на солдат, задействовать новую тактику и повысить возможности солдат.
По словам Хэтфилда армия достигнет этого за счет восстановления и поддержания выбранной срочной программы до реализации запланированных программ; снижения стоимости за счет унифицированности внутри классов; использования готовых коммерческих технологий; постепенного внедрения автономности в подразделения; и, наконец, за счет обратной связи с пользователями, которая является неотъемлемой частью процесса разработки технологии.
Армия разделила все свои работы на текущие, формирующиеся и будущие программы, каждая с разной степенью готовности и финансирования. Текущие финансируемые работы включают MTRS Increment 1, RONS и M160, тогда как формирующиеся потребности (без гарантии завершения) включают программу совершенствования роботизации Robotics Enhancement Program (REP).
REP скопирована с программы совершенствования солдата Soldier Enhancement Program (SEP), а начать её планируется в 2015 году. В рамках этой программы будут открыто финансирование для армии с целью приобретения коммерческих готовых изделий и готовых экспериментальных систем, которым после оценки может быть дан либо статус перехода к плановой программе, либо статус информационного наполнения для плановой программы. Подполковник Хатфилд сказал, что это связано с озабоченностью промышленности касательно того, что было проведено слишком много демонстраций без какого-либо возврата инвестиций. «Это не золотой билет в планируемую программу, но, по крайней мере, это дает некоторую окупаемость вложений в проведенную тяжелую работу».
Другие краткосрочные (2015-2020) и среднесрочные (2012-2030) цели включают новый микро-АНА, общие роботизированные системы Common Robotic Systems-Individual (CRS-I), тактический контроллер Tactical Robotic Controller (TRC) и многоцелевую систему для перевозки снаряжения отделения Squad Multi-purpose Equipment Transport (SMET).
Ведутся работы по новой микросистеме в рамках программы по общему легкому роботизированному комплекту Common Lightweight Autonomous Robotics Kit (CLARK), проводимой Управлением по разработке доктрины и боевой подготовке TRADOC. По программе CLARK отделение будет обеспечено комплектом небольших роботизированных систем, которые смогут выполнять ближнюю разведку с различной степенью автономности. Полный комплект будет включать необслуживаемый наземный сенсор, микро-АНА и микро-БЛА (с автономными характеристиками). Общая масса всех компонентов, включая общий контроллер, может составить примерно 4,5 кг. Разрабатываемый полуавтономный сверхлегкий разведывательный робот Ultra Light Recon Robot (ULRR) предназначен для выполнения роли микро-АНА.
CRS-I представляет собой замену армейской программы по малому АНА (small UGV –SUGV), которая была закрыта в апреле 2013 года. Армия ищет систему, которая имеет в два раза меньшую массу и в два раза меньшую стоимость по сравнению с аппаратом SUGV, и ожидает одобрения этого требования.

Дистанционно управляемая машина боевого обеспечения от Уралвагонзавода была поставлена в российскую армию
Разгрузить солдат на уровне отделения – вот еще одна возможная сфера применения безэкипажных систем. «Мы отправили систему перевозки солдатского снаряжения SMSS (Squad Mission Support System производства компании Lockheed Martin) в Афганистан; полуавтономная система следует за солдатами по всему полю боя и везет их снаряжение. Впрочем, в Управлении испытаний и оценки оружия и военной техники сообщили, что они не доверяют системе и поэтому она не может работать в полуавтономном режиме. Она прибыла на место и мы тут же получили жалобы, что аккумуляторы дистанционного контроллера сели, а сама система неудобна в эксплуатации. Хорошо, разработка системы имела свои недостатки. Дистанционное управление оказалось избыточным, это ненужный режим, который вы должны использовать, когда аппарат не следует за вами. Это совершенно изменило мнение о нем и восприятие его солдатами. Аппарат не разгрузил солдат; это когнитивная и физическая нагрузка, поскольку они должны положить свое оружие, взять дистанционное управление и управлять системой, которая вообще-то должна самостоятельно следовать за ними. Почему так случилось? Потому что у тех, кто оценивал и испытывал эту систему, не было доверия к ней».
Впрочем, разработка SMSS не завершена, продолжаются испытания системы в ряде ролей, включая работу совместно с БЛА. Объединение АНА и беспилотника является особой целью американской армии.
Среди других крупных систем в списке армии числятся системы по расчистке маршрутов Type 1 и 2 Route Clearance and Interrogation System, которые позволяют дистанционно управлять машинами High Mobility Engineer Excavator и RG-31 (обе оснащены различным инженерным оборудованием и приспособлениями для борьбы с СВУ) соответственно и система обнаружения мин на машине Husky Mounted Detection System (HMDS). HMDS – это действующая программа, в рамках которой разработана система полуавтономного управления комплексом Husky с безопасной дистанции.
Сертификация и существующие меры безопасности могут значительно помешать развертыванию крупных АНА, а особенно дополнительных систем. «Ничего нет совершенного, мы никогда не сможем развернуть беспилотные наземные системы и автономные машины и ожидать от них безаварийной работы. Но мы должны выработать это доверие и уверенность, преодолеть этот культурный барьер между тем, что мы ожидаем от человека и что от машины».
В этой связи могут возникнуть проблемы у армейской автономной системы Autonomous Mobility Applique System CDD (ныне известная как Autonomous Convoy Operations - ACO). ACO – это дополнительный комплект, созданный для трансформации существующих экипажных платформ в безэкипажные платформы. «Я считаю, что это очень успешный проект, но есть проблемы... Я не думаю, что это проблема технологии в контексте того, готовы ли мы идти по этому пути. Я вижу проблему в том, как мы ее будем использовать, как мы ее сертифицируем, как мы сделаем ее безопасной, поскольку испытатели знают только, как испытывать грузовик с человеком внутри», – пояснил подполковник Роберсон.
Многое из будущих возможностей, которые хотела иметь армия, разрабатывалось в рамках отмененной программы FCS (Боевые системы будущего). В соответствии с ней разрабатывалась общая роботизированная платформа MULE (Multifunction Utility/Logistics and Equipment), которая могла бы реконфигурироваться под различные задачи, включая платформу боевой поддержки. После отмены FCS армия продолжила разработку боевого варианта в виде вооруженной роботизированной платформы (легкой) ARV-A(L) (Armed Robotic Vehicle-Assault (light)), которая, однако, также была положена на полку.
В то время как американская армия сохраняет потребности в перспективном тактическом боевом АНА, в других армиях подобные системы уже состоят на вооружении. Несколько моделей АНА компании G-NIUS способны принять вооружение, а Уралвагонзавод разработал гусеничную систему, которая была поставлена в российскую армию.
Она предназначена для ведения наблюдения и разведки, а также прямой и непрямой боевой поддержки. Аппарат оборудован гиростабилизированной установкой вооружения и комплектом оптико-электронных и инфракрасных устройств. По данным компании аппарат может работать на дистанции до 5 км и двигаться со скоростью до 35 км/ч; также сообщается о шифрованной системе связи.
Хотя мобильность базовых платформ может быть одним из низкотехнологичных препятствий, которое нужно преодолеть, но все же решение этой проблемы очень важно. «Мобильность с моей точки зрения заключается в вопросе «Может ли платформа поддерживать темп подразделения или солдат, которым система собственно и придана?»... Я смотрю широко. Я не могу сказать определенно, что система должна иметь, колеса, гусеницы или ноги. Это не мое дело, мое дело посмотреть на потребности, посмотреть на обстановку и предложить систему, которая будет работать в этой обстановке», – сказал подполковник Роберсон.
Это не только проблема более крупных систем, предназначенных для поддержки подразделений, например шагающей системы поддержки отделения Legged Squad Support System корпуса морской пехоты. Это также затрагивает и небольшие системы. Подполковник Хэтфилд пояснил: «Мобильность, по всей видимости, является основной проблемой для всех подобных систем, особенно в связи с тем, что мы собираемся переходить на микро- и наномасштабы. Для микро-АНА или забрасываемого робота всё, что есть на пути, препятствие, однако если бы он мог зависать над полом на метр или два, тогда он смог бы сделать многое и открыть новые миры. Здесь исчезает граница между воздухом и землей».
Послесловие
Американский рынок автоматических наземных аппаратов
Вывод войск из Ирака и Афганистана, а также радикальная ревизия американской армии, проведенная в феврале 2013 года, стали причиной быстрого сокращения рынка конечных пользователей АНА. В соответствии с проведенным анализом планируется передать 2469 АНА в другие структуры и оставить 2700 платформ для модернизации и восстановления.
В марте 2014 года в бюджет Пентагона 2015 были добавлены средства для программы роботизированного боевого обеспечения Robotic Combat Support System (RCSS), в соответствии с которой предусмотрена закупка M160, переносных систем Man Transportable Robot System (MTRS) Inc II и Robotic Clearance Integration System (RCIS). В контракт был также включена модернизация MTRS, обеспечивающая возможность выполнять дистанционную разведку и обезвреживание взрывоопасных предметов в ситуациях, когда RONS для этого слишком большой.
Модернизация включает замену систем связи и непригодных деталей и компонентов. Впрочем, были проведены небольшие изменения в финансировании программы AEODRS. Дата начала производства была отодвинута; решение по Increment 1 было запланировано на середину 2015 года, начало производства на конец 2016 года, а выполнение программы постоянных улучшений продлено до конца 2019 года.
Небольшому сокращению финансирования подвергся проект по роботизированным наземным системам Robotic Ground Systems, по которому разрабатываются и демонстрируются автономные технологии. Произошло значительное сокращение в проекте TS2/Robotics Technology, по которому создаются, оцениваются и изучаются автономные технологии, позволяющие роботам содействовать военным задачам.
Была начата новая программа по тактическому автоматическому наземному аппарату Tactical Unmanned Ground Vehicle (TUGV), который вобрал в себя функциональность общей роботизированной системы Common Robotic System (Individual) и ряд других формирующихся требований к разработкам и испытаниям роботизированных систем.
В результате всех этих перемен радикально изменились размеры и структура рынка. Прошлые пять лет на нем преобладали продажи для военных операций в Ираке и Афганистане. В следующие 10 лет прогнозируются существенно меньшие продажи, но с возможностью повышения примерно после 2016 года в связи с научными исследованиями и разработками, запланированными для основных инициатив, таких как, например TUGV. Предполагается, что в последние годы прогнозируемого десятилетнего периода объем производства вырастет, поскольку с целью удовлетворения растущего спроса начнется масштабный выпуск модульных систем нового поколения.
Использованы материалы:
www.janes.com
www.dtic.mil
www.auvsi.org
www.irobot.com
www.northropgrumman.com
www.stratom.com
www.uvz.ru
Информация