Проект космических реактивных ранцев Chance-Vought SMU/AMU
Реактивные ранцы пятидесятых годов прошлого века не могли похвастать высокими характеристиками. Те аппараты, которым все же удавалось подняться в воздух, имели слишком высокий расход топлива, что негативно сказывалось на максимально возможной продолжительности полета. Кроме того, у разных конструкций присутствовали некоторые другие проблемы. Со временем военные и инженеры разочаровались в подобной технике, которая ранее считалась перспективной и многообещающей. Тем не менее, это не привело к полной остановке работ. В самом конце пятидесятых годов этой темой заинтересовалась организация NASA, которая рассчитывала применить новую технику в космических программах.
В обозримом будущем специалисты НАСА рассчитывали не только отправить человека в космос, но и решить несколько других задач. В частности, рассматривалась возможность работы в открытом космосе, за пределами корабля. Для полноценного решения задач в таких условиях требовался некий аппарат, при помощи которого астронавт мог бы свободно перемещаться в нужном направлении, маневрировать и т.д. В самом начале шестидесятых годов организация NASA запросила помощь у военно-воздушных сил, которые к этому времени успели провести несколько подобных программ. Кроме того, она привлекла к работам несколько предприятий авиационной промышленности, которым предложили разработать свои варианты персонального летательного аппарата для космической программы. Среди прочих такое предложение получила компания Chance-Vought.
По имеющимся данным, еще на стадии предварительных исследований специалисты НАСА пришли к выводам относительно оптимального форм-фактора перспективной техники. Оказалось, что самым удобным индивидуальным средством передвижения будет ранец с набором реактивных двигателей малой мощности. Именно такие аппараты заказали компаниям-подрядчикам. Следует отметить, рассматривались и иные варианты аппарата, однако оптимальным признали именно ранец, надеваемый на спину астронавта.
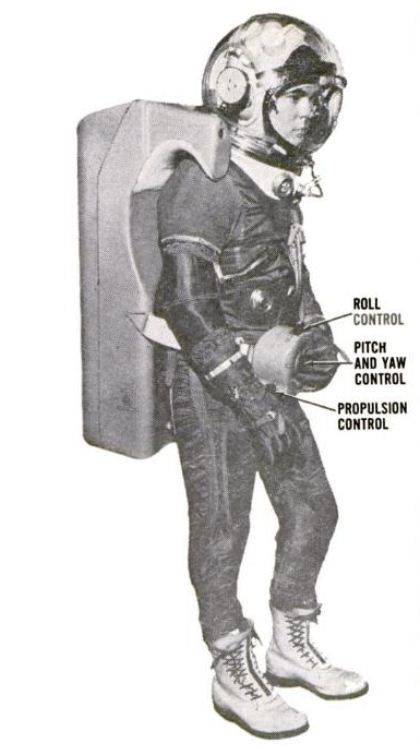
Общий вид скафандра от Chance-Vought и аппарата SMU. Фото журнала Popular Science
В течение нескольких следующих лет компания «Чанс-Воут» провела ряд исследований и сформировала облик транспортного средства для космоса. Проект получил обозначение SMU (Self-Maneuvering Unit – «Самостоятельно маневрирующее устройство»). На поздних стадиях разработки проекта и во время испытаний применялось новое обозначение. Аппарат переименовали в AMU (Astronaut Maneuvering Unit – «Устройство для маневрирования астронавта»).
Вероятно, авторы проекта SMU имели представление о разработках команды Уэнделла Мура из компании Bell Aerosystems, а также знали о других разработках в этой области. Дело в том, что реактивные ранцы компании «Белл» и появившийся чуть позже них космический аппарат должны были иметь одинаковые двигатели, хотя и отличающиеся характеристиками. Изделие SMU предлагалось оснастить реактивными двигателями, работающими на пероксиде водорода и использующие его каталитическое разложение.
Процесс каталитического разложения перекиси водорода к этому времени активно использовался в различной технике, в том числе и в некоторых ранних реактивных ранцах. Суть этой идеи состоит в подаче «топлива» на специальный катализатор, вызывающий разложение вещества на воду и кислород. Образующаяся парогазовая смесь имеет достаточно высокую температуру, а также расширяется с высокой скоростью, что позволяет использовать ее в качестве источника энергии, в том числе и в реактивных двигателях.
Следует отметить, что разложение перекиси водорода является не самым экономичным источником энергии в контексте реактивных ранцев. Для образования тяги, достаточной для подъема человека в воздух, требуется слишком много «топлива». Так, в проектах компании «Белл» 20-литровый бак позволял пилоту продержаться в воздухе не более 25-30 с. Тем не менее, это было справедливо только для полетов на Земле. В случае с открытым космосом или поверхностью Луны, за счет меньшего (или отсутствующего) веса астронавта, имелась возможность обеспечить требуемые характеристики аппарата без неприемлемо высокого расхода перекиси водорода.
В ходе проекта SMU предстояло решить несколько основных вопросов, основным из которых, естественно, был тип реактивного двигателя. Кроме того, следовало определить оптимальную компоновку всего устройства, состав необходимого оборудования и ряд других особенностей проекта. По имеющимся данным, проработка этих вопросов в итоге привела к проектированию оригинального космического скафандра, который предлагалось использовать с изделием SMU/AMU.
Основные конструкторские работы завершились в первой половине 1962 года, вскоре после этого компания Chance-Vought изготовила опытный образец космического реактивного ранца. Осенью того же года аппарат впервые показали прессе. В ноябрьском номере Popular Science впервые были опубликованы изображения предлагаемой системы. Кроме того, в статье этого журнала приводилась компоновочная схема и некоторые основные характеристики.
На одном из фото, опубликованных «Популярной наукой», был изображен астронавт в новом скафандре, на спине которого находился аппарат SMU. Предлагаемый скафандр имел шлем сферической формы с опускаемым лицевым щитком и развитой нижней частью, которой тот должен был опираться на плечи астронавта. Там же располагались несколько разъемов для соединения скафандра с системами реактивного ранца. Скафандр от Chance-Vought заметно отличался от современных изделий этого назначения. Его выполнили максимально легким и, по-видимому, не оснастили набором средств защиты, которые необходимы для соответствия нынешним требованиям.
Сам ранец представлял собой прямоугольный блок с вогнутой передней стенкой и набором средств для закрепления на спине астронавта. Так, сверху на передней стенке имелись два характерных «крюка», которыми ранец опирался на плечи астронавта. В средней части имелся поясной ремень, на котором располагался цилиндрический пульт управления с несколькими рычагами. Также предусматривались несколько кабелей и гибких трубопроводов для подключения ранца к скафандру.
Необходимость обеспечения длительной работы за пределами космического корабля, а также несовершенство технологий того времени сказались на компоновке аппарата. В верхней части изделия SMU располагался крупный блок кислородной системы замкнутого цикла. Это устройство предназначалось для подачи дыхательной смеси в шлем астронавта с последующей откачкой выдыхаемых газов и удалением углекислого газа. В отличие от шлангов для подачи дыхательной смеси с корабля или баллонов для сжатого газа, система с поглотителями углекислого газа не ухудшала маневренность астронавта и позволяла оставаться в открытом космосе в течение длительного времени.
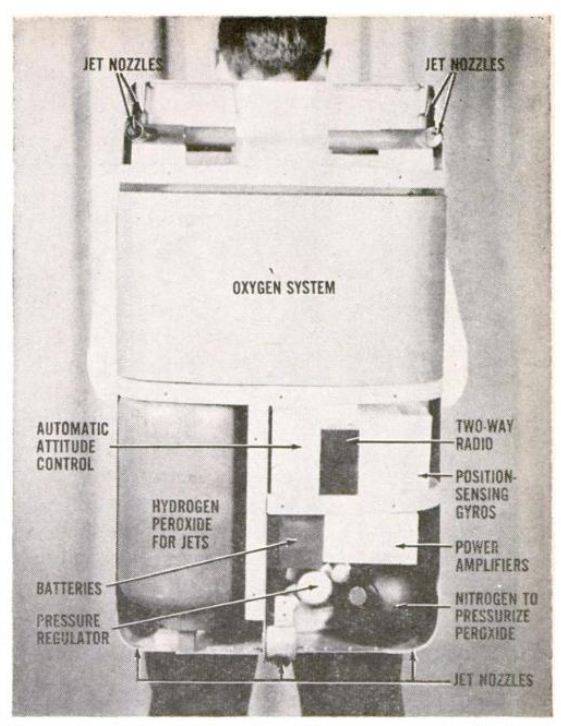
Аппарат SMU без задней панели. Фото журнала Popular Science
По имеющимся данным, в ходе демонстрации журналистам аппарат SMU не был оснащен рабочей системой жизнеобеспечения. Эта аппаратура еще не была готова к работе и нуждалась в дополнительных проверках, из-за чего на опытном экземпляре ее заменили аналогичным по весу и габаритам имитатором. Именно в такой конфигурации аппарат принял участие в первых испытаниях. Более того, работы в этом направлении серьезно затянулись, из-за чего даже более поздний прототип, построенный в конце 1962 года, испытывался без кислородной системы и оснащался только ее имитатором.
Нижнюю левую часть корпуса (относительно пилота) отдали под размещение бака для пероксида водорода. Справа от него расположили набор прочего оборудования различного назначения. Вверху нижнего правого отсека находилась радиостанция, обеспечивающая двустороннюю голосовую связь, под ней установили аккумуляторные батареи и блок питания аппаратуры, а также баллон для сжатого азота системы подачи топлива и газовый регулятор.
На боковых гранях верхней поверхности реактивного ранца предусмотрели четыре миниатюрных двигателя с собственными соплами (по два с каждой стороны). Такие же двигатели имелись на нижней поверхности корпуса. Кроме того, два двигателя схожей компоновки располагались в центре нижней поверхности. В общей сложности для выброса реактивных газов имелось 10 двигателей. Сопла всех двигателей были повернуты и наклонены разные стороны и должны были отвечать за создание тяги, направленной в нужном направлении.
Каждый двигатель, по имеющейся информации, представлял собой небольшой блок с пластинчатым катализатором, провоцирующим разложение топлива. Перед катализатором имелся клапан, управляемый соленоидом. Все десять двигателей предлагалось связать с топливным баком, который, в свою очередь, соединялся с баллоном для сжатого газа.
Принцип работы двигателей был прост. Под давлением сжатого азота перекись водорода должна была поступать в трубопроводы и достигать двигателей. По команде системы управления соленоиды двигателей должны были открывать клапаны и обеспечивать доступ «топлива» к катализаторам. Далее следовала реакция разложения с выбросом парогазовой смеси через сопло и образованием тяги.
Сопла располагались таким образом, чтобы путем синхронного или асимметричного включения двигателей можно было двигаться в нужном направлении, совершать повороты или корректировать свое положение. К примеру, одновременное включение всех двигателей, направленных назад, позволяло двигаться вперед, а поворот осуществлялся за счет асимметричного включения двигателей разных бортов.
Первый вариант аппарата SMU получил сравнительно простой пульт управления, выполненный в цилиндрическом корпусе и расположенный на поясном ремне. Сбоку, под правой рукой, находился рычаг управления поступательным движением вперед или назад. На передней стенке поместили рычаг для управления по тангажу и рысканью. Сверху находился еще один рычажок, отвечавший за управление по крену. Кроме того, предусматривались тумблеры для включения двигателя, радиостанции и автопилота. При помощи таких органов управления пилот мог подавать перекись водорода в нужные двигатели и тем самым управлять своими перемещениями.
Помимо ручного управления аппарат SMU имел автоматику, предназначенную для облегчения работы астронавта. При необходимости он мог включить автопилот, который при помощи гироскопа и сравнительно простой электроники должен был следить за положением реактивного ранца в пространстве, при необходимости корректируя его. Предполагалось, что такой режим будет применяться при длительных работах на одном месте, например, при обслуживании приборов на внешней поверхности космического корабля. В таком случае астронавт получал возможность выполнения различных работ, а за сохранением нужного положения должна была следить автоматика.
Представленный журналистам вариант реактивного ранца SMU весил порядка 160 фунтов (около 72 кг). При использовании на Луне вес аппарата сокращался до 25 фунтов (11,5 кг), а при работе на орбите Земли вес должен был полностью отсутствовать.
Макет реактивного ранца SMU во время испытаний. Фото из отчета
Согласно публикации издания Popular Science, представленный образец аппарата SMU, по расчетам, позволял астронавту пролететь на одной заправке пероксидом водорода до 1000 футов (304 м). Тяги двигателей, по словам разработчиков, хватало для перемещения достаточно крупных грузов. К примеру, заявлялась возможность перемещения объекта, например космического аппарата, массой до 50 т. При этом астронавт должен был развивать скорость порядка одного фута в секунду.
Еще за несколько месяцев до демонстрации аппарата SMU журналистам, в середине 1962 года, опытный образец доставили на авиабазу Райт-Паттерсон (шт. Огайо), где должны были пройти его испытания. Для проведения всех необходимых тестов к проекту были привлечены специалисты министерства обороны, а также специальная техника. Так, в качестве платформы для испытаний выбрали специальный самолет KC-135 Zero G, использовавшийся для исследований в условиях кратковременной невесомости.
Первый полет с «нулевой гравитацией» прошел 25 июня 62-го, и за последующие месяцы были выполнены несколько десятков проверок работы реактивного ранца в условиях невесомости. За это время удалось установить принципиальную возможность использования подобных систем на практике. Кроме того, были подтверждены некоторые характеристики и основные летные данные. Так, тяги двигателей хватало для полета в воздушной атмосфере и выполнения некоторых несложных маневров.
Успешные испытания аппарата SMU не привели к остановке проектных работ. К концу 1962 года стартовала разработка обновленной версии реактивного ранца для астронавтов. В модернизированном варианте проекта предлагалось изменить компоновку аппарата, а также внести в конструкцию некоторые иные коррективы. За счет всего этого предполагалось повысить характеристики, в первую очередь запас «топлива» и основные летные данные. После начала работ по обновленному проекту появилось новое название AMU, которое вскоре начали применять и по отношению к предыдущему изделию SMU, из-за чего возможна некоторая путаница.
По имеющимся данным, модернизированный AMU внешне почти не отличался от базового SMU. Экстерьер корпуса не претерпел серьезных изменений, осталась прежней и система крепления аппарата на спине астронавта. При этом кардинальным образом изменилась компоновка внутренних агрегатов. Дальность полета на уровне 300 м не устроил НАСА, из-за чего было предложено использовать новый топливный бак. Реактивный ранец AMU получил крупный бак для перекиси водорода большой длины, занявший всю центральную часть корпуса. Объем нового бака составлял 660 куб. дюймов (10,81 л). По бокам этого бака расположили прочее оборудование.
Среди прочих агрегатов в новом аппарате сохранился бак для сжатого азота вытеснительной системы подачи пероксида водорода. Согласно проекту, азот должен был подаваться в топливный бак под давлением на уровне 3500 psi (238 атмосферы). Тем не менее, в ходе испытаний использовались меньшие давления: порядка 200 psi (13,6 атм). Опытный образец аппарата AMU оснащался двигателями различной мощности. Так, сопла, отвечающие за перемещение вперед и назад, развивали тягу на уровне 20 фунтов, используемые для передвижений вверх и вниз – по 10 фунтов.
Аппарат AMU в перспективе мог получить систему жизнеобеспечения, однако даже к моменту начала испытаний подобная аппаратура еще не была готова. Из-за этого опытный AMU, как и его предшественник, получил только макет нужной системы с аналогичными габаритами и весом. После завершения всех необходимых проектных работ и испытаний кислородная система могла быть установлена на космический реактивный ранец.
Вскоре после окончания сборки, в самом конце 1962-го или в начале 1963 года, аппарат AMU отправили на базу Райт-Паттерсон для проведения испытаний. «Полигоном» для его проверок вновь стал специально оборудованный самолет KC-135 Zero G. Различные проверки продолжались, как минимум, до конца весны 1963 года.
В середине мая 1963 года авторы проекта подготовили отчет о проведенных испытаниях. К этому времени, как утверждалось в документе, было проведено свыше сотни полетов по параболической траектории, в ходе которых проверялась работа реактивных ранцев в условиях невесомости. За время испытаний, несмотря на малую продолжительность полетов с нулевой гравитацией, удалось освоить управление обоими аппаратами, а также проверить их возможности по транспортировке пилота или грузов.
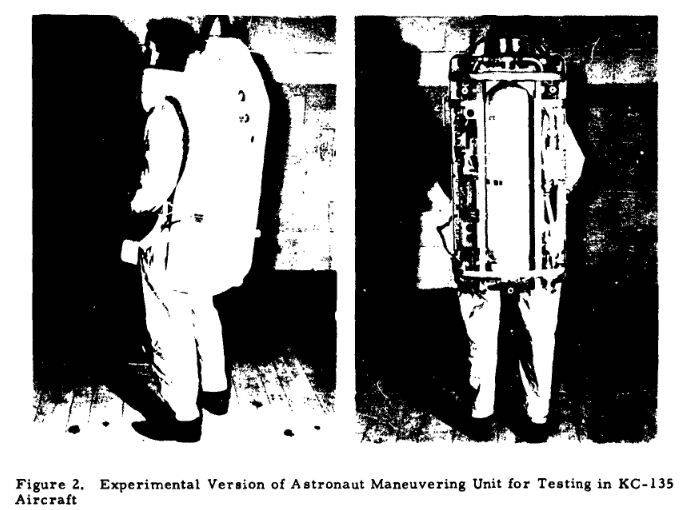
Ранец AMU во время испытаний. Фото из отчета
В заключительной части отчета утверждалось, что реактивный ранец AMU в существующем виде имеет удовлетворительные характеристики и может использоваться для решения возлагаемых на него задач. Также отмечалось, что тяга двигателей до 20 фунтов достаточна для управляемого полета в нужном направлении и выполнения различных маневров. Выбранное расположение сопел двигателей обеспечивало, как написано в отчете, отличный контроль над аппаратом за счет размещения на равном расстоянии от центра тяжести системы «пилот+ранец».
Автопилот в целом показал себя неплохо, но нуждался в доработках и дополнительных испытаниях. В некоторых ситуациях это устройство не могло правильно среагировать на изменение положения ранца. Кроме того, предлагалось «научить» автоматику управления игнорировать небольшие (до 10°) отклонения аппарата от указанного положения. Такой режим позволял заметно сократить расход перекиси водорода.
Астронавты, которым в будущем предстояло использовать изделие AMU, должны были проходить специальный курс подготовки, в ходе которого они могли бы не только освоить управление, но и научиться «чувствовать» аппарат. Необходимость этого была доказана несколькими тестовыми полетами под управлением пилота с недостаточным уровнем подготовки. В таких случаях пилот действовал медленно и не отличался аккуратностью управления.
В целом, авторы отчета высоко оценили и сам аппарат AMU, и результаты его испытаний. Рекомендовалось продолжить работы по проекту, продолжить совершенствование всей конструкции и ее отдельных компонентов, а также уделить внимание некоторым режимам полета. Все эти меры позволяли рассчитывать на появление работоспособного реактивного ранца для астронавтов, полностью пригодного для решения всех возлагаемых задач.
NASA и Chance-Vought, а также ряд смежных организаций приняли во внимание доклад испытателей и продолжили работы по перспективным проектам. К середине десятилетия на основе наработок по проекту SMU/AMU был разработан новый аппарат, который даже планировалось испытать в открытом космосе.
Дальнейшие работы в области космических реактивных ранцев увенчались успехом. В начале восьмидесятых годов в космос были отправлены первые аппараты MMU, использовавшиеся в составе оборудования космических кораблей Space Shuttle. Эта аппаратура активно применялась в различных миссиях при решении разнообразных задач. Таким образом, идея реактивного ранца, несмотря на массу неудач, дошла до практического применения. Правда, использовать ее стали не на Земле, а в космосе.
По материалам:
http://theverge.com/
http://dtic.mil/
http://flyingcarsandfoodpills.com/
Jet pack turns astronaut into human spacecraft. Popular Science. 1962, №11
Letho S. The Great American Jet Pack: The Quest for the Ultimate Individual Lift Device. Chicago Review Press, 2013
Отчет об испытаниях аппаратов SMU/AMU:
http://dtic.mil/dtic/tr/fulltext/u2/403729.pdf
В обозримом будущем специалисты НАСА рассчитывали не только отправить человека в космос, но и решить несколько других задач. В частности, рассматривалась возможность работы в открытом космосе, за пределами корабля. Для полноценного решения задач в таких условиях требовался некий аппарат, при помощи которого астронавт мог бы свободно перемещаться в нужном направлении, маневрировать и т.д. В самом начале шестидесятых годов организация NASA запросила помощь у военно-воздушных сил, которые к этому времени успели провести несколько подобных программ. Кроме того, она привлекла к работам несколько предприятий авиационной промышленности, которым предложили разработать свои варианты персонального летательного аппарата для космической программы. Среди прочих такое предложение получила компания Chance-Vought.
По имеющимся данным, еще на стадии предварительных исследований специалисты НАСА пришли к выводам относительно оптимального форм-фактора перспективной техники. Оказалось, что самым удобным индивидуальным средством передвижения будет ранец с набором реактивных двигателей малой мощности. Именно такие аппараты заказали компаниям-подрядчикам. Следует отметить, рассматривались и иные варианты аппарата, однако оптимальным признали именно ранец, надеваемый на спину астронавта.
Общий вид скафандра от Chance-Vought и аппарата SMU. Фото журнала Popular Science
В течение нескольких следующих лет компания «Чанс-Воут» провела ряд исследований и сформировала облик транспортного средства для космоса. Проект получил обозначение SMU (Self-Maneuvering Unit – «Самостоятельно маневрирующее устройство»). На поздних стадиях разработки проекта и во время испытаний применялось новое обозначение. Аппарат переименовали в AMU (Astronaut Maneuvering Unit – «Устройство для маневрирования астронавта»).
Вероятно, авторы проекта SMU имели представление о разработках команды Уэнделла Мура из компании Bell Aerosystems, а также знали о других разработках в этой области. Дело в том, что реактивные ранцы компании «Белл» и появившийся чуть позже них космический аппарат должны были иметь одинаковые двигатели, хотя и отличающиеся характеристиками. Изделие SMU предлагалось оснастить реактивными двигателями, работающими на пероксиде водорода и использующие его каталитическое разложение.
Процесс каталитического разложения перекиси водорода к этому времени активно использовался в различной технике, в том числе и в некоторых ранних реактивных ранцах. Суть этой идеи состоит в подаче «топлива» на специальный катализатор, вызывающий разложение вещества на воду и кислород. Образующаяся парогазовая смесь имеет достаточно высокую температуру, а также расширяется с высокой скоростью, что позволяет использовать ее в качестве источника энергии, в том числе и в реактивных двигателях.
Следует отметить, что разложение перекиси водорода является не самым экономичным источником энергии в контексте реактивных ранцев. Для образования тяги, достаточной для подъема человека в воздух, требуется слишком много «топлива». Так, в проектах компании «Белл» 20-литровый бак позволял пилоту продержаться в воздухе не более 25-30 с. Тем не менее, это было справедливо только для полетов на Земле. В случае с открытым космосом или поверхностью Луны, за счет меньшего (или отсутствующего) веса астронавта, имелась возможность обеспечить требуемые характеристики аппарата без неприемлемо высокого расхода перекиси водорода.
В ходе проекта SMU предстояло решить несколько основных вопросов, основным из которых, естественно, был тип реактивного двигателя. Кроме того, следовало определить оптимальную компоновку всего устройства, состав необходимого оборудования и ряд других особенностей проекта. По имеющимся данным, проработка этих вопросов в итоге привела к проектированию оригинального космического скафандра, который предлагалось использовать с изделием SMU/AMU.
Основные конструкторские работы завершились в первой половине 1962 года, вскоре после этого компания Chance-Vought изготовила опытный образец космического реактивного ранца. Осенью того же года аппарат впервые показали прессе. В ноябрьском номере Popular Science впервые были опубликованы изображения предлагаемой системы. Кроме того, в статье этого журнала приводилась компоновочная схема и некоторые основные характеристики.
На одном из фото, опубликованных «Популярной наукой», был изображен астронавт в новом скафандре, на спине которого находился аппарат SMU. Предлагаемый скафандр имел шлем сферической формы с опускаемым лицевым щитком и развитой нижней частью, которой тот должен был опираться на плечи астронавта. Там же располагались несколько разъемов для соединения скафандра с системами реактивного ранца. Скафандр от Chance-Vought заметно отличался от современных изделий этого назначения. Его выполнили максимально легким и, по-видимому, не оснастили набором средств защиты, которые необходимы для соответствия нынешним требованиям.
Сам ранец представлял собой прямоугольный блок с вогнутой передней стенкой и набором средств для закрепления на спине астронавта. Так, сверху на передней стенке имелись два характерных «крюка», которыми ранец опирался на плечи астронавта. В средней части имелся поясной ремень, на котором располагался цилиндрический пульт управления с несколькими рычагами. Также предусматривались несколько кабелей и гибких трубопроводов для подключения ранца к скафандру.
Необходимость обеспечения длительной работы за пределами космического корабля, а также несовершенство технологий того времени сказались на компоновке аппарата. В верхней части изделия SMU располагался крупный блок кислородной системы замкнутого цикла. Это устройство предназначалось для подачи дыхательной смеси в шлем астронавта с последующей откачкой выдыхаемых газов и удалением углекислого газа. В отличие от шлангов для подачи дыхательной смеси с корабля или баллонов для сжатого газа, система с поглотителями углекислого газа не ухудшала маневренность астронавта и позволяла оставаться в открытом космосе в течение длительного времени.
Аппарат SMU без задней панели. Фото журнала Popular Science
По имеющимся данным, в ходе демонстрации журналистам аппарат SMU не был оснащен рабочей системой жизнеобеспечения. Эта аппаратура еще не была готова к работе и нуждалась в дополнительных проверках, из-за чего на опытном экземпляре ее заменили аналогичным по весу и габаритам имитатором. Именно в такой конфигурации аппарат принял участие в первых испытаниях. Более того, работы в этом направлении серьезно затянулись, из-за чего даже более поздний прототип, построенный в конце 1962 года, испытывался без кислородной системы и оснащался только ее имитатором.
Нижнюю левую часть корпуса (относительно пилота) отдали под размещение бака для пероксида водорода. Справа от него расположили набор прочего оборудования различного назначения. Вверху нижнего правого отсека находилась радиостанция, обеспечивающая двустороннюю голосовую связь, под ней установили аккумуляторные батареи и блок питания аппаратуры, а также баллон для сжатого азота системы подачи топлива и газовый регулятор.
На боковых гранях верхней поверхности реактивного ранца предусмотрели четыре миниатюрных двигателя с собственными соплами (по два с каждой стороны). Такие же двигатели имелись на нижней поверхности корпуса. Кроме того, два двигателя схожей компоновки располагались в центре нижней поверхности. В общей сложности для выброса реактивных газов имелось 10 двигателей. Сопла всех двигателей были повернуты и наклонены разные стороны и должны были отвечать за создание тяги, направленной в нужном направлении.
Каждый двигатель, по имеющейся информации, представлял собой небольшой блок с пластинчатым катализатором, провоцирующим разложение топлива. Перед катализатором имелся клапан, управляемый соленоидом. Все десять двигателей предлагалось связать с топливным баком, который, в свою очередь, соединялся с баллоном для сжатого газа.
Принцип работы двигателей был прост. Под давлением сжатого азота перекись водорода должна была поступать в трубопроводы и достигать двигателей. По команде системы управления соленоиды двигателей должны были открывать клапаны и обеспечивать доступ «топлива» к катализаторам. Далее следовала реакция разложения с выбросом парогазовой смеси через сопло и образованием тяги.
Сопла располагались таким образом, чтобы путем синхронного или асимметричного включения двигателей можно было двигаться в нужном направлении, совершать повороты или корректировать свое положение. К примеру, одновременное включение всех двигателей, направленных назад, позволяло двигаться вперед, а поворот осуществлялся за счет асимметричного включения двигателей разных бортов.
Первый вариант аппарата SMU получил сравнительно простой пульт управления, выполненный в цилиндрическом корпусе и расположенный на поясном ремне. Сбоку, под правой рукой, находился рычаг управления поступательным движением вперед или назад. На передней стенке поместили рычаг для управления по тангажу и рысканью. Сверху находился еще один рычажок, отвечавший за управление по крену. Кроме того, предусматривались тумблеры для включения двигателя, радиостанции и автопилота. При помощи таких органов управления пилот мог подавать перекись водорода в нужные двигатели и тем самым управлять своими перемещениями.
Помимо ручного управления аппарат SMU имел автоматику, предназначенную для облегчения работы астронавта. При необходимости он мог включить автопилот, который при помощи гироскопа и сравнительно простой электроники должен был следить за положением реактивного ранца в пространстве, при необходимости корректируя его. Предполагалось, что такой режим будет применяться при длительных работах на одном месте, например, при обслуживании приборов на внешней поверхности космического корабля. В таком случае астронавт получал возможность выполнения различных работ, а за сохранением нужного положения должна была следить автоматика.
Представленный журналистам вариант реактивного ранца SMU весил порядка 160 фунтов (около 72 кг). При использовании на Луне вес аппарата сокращался до 25 фунтов (11,5 кг), а при работе на орбите Земли вес должен был полностью отсутствовать.
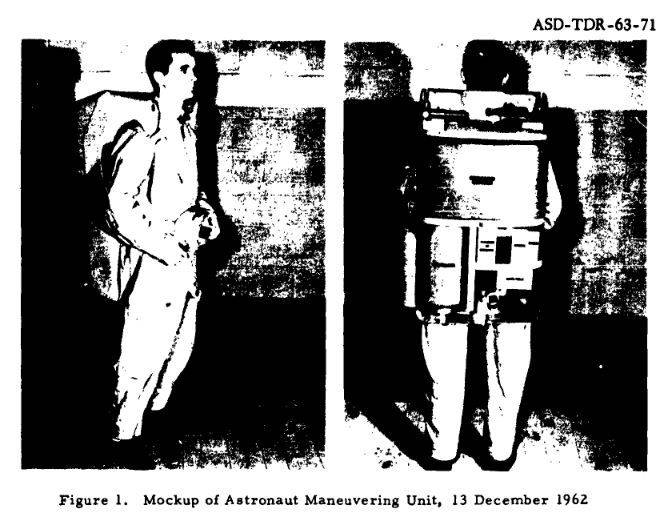
Макет реактивного ранца SMU во время испытаний. Фото из отчета
Согласно публикации издания Popular Science, представленный образец аппарата SMU, по расчетам, позволял астронавту пролететь на одной заправке пероксидом водорода до 1000 футов (304 м). Тяги двигателей, по словам разработчиков, хватало для перемещения достаточно крупных грузов. К примеру, заявлялась возможность перемещения объекта, например космического аппарата, массой до 50 т. При этом астронавт должен был развивать скорость порядка одного фута в секунду.
Еще за несколько месяцев до демонстрации аппарата SMU журналистам, в середине 1962 года, опытный образец доставили на авиабазу Райт-Паттерсон (шт. Огайо), где должны были пройти его испытания. Для проведения всех необходимых тестов к проекту были привлечены специалисты министерства обороны, а также специальная техника. Так, в качестве платформы для испытаний выбрали специальный самолет KC-135 Zero G, использовавшийся для исследований в условиях кратковременной невесомости.
Первый полет с «нулевой гравитацией» прошел 25 июня 62-го, и за последующие месяцы были выполнены несколько десятков проверок работы реактивного ранца в условиях невесомости. За это время удалось установить принципиальную возможность использования подобных систем на практике. Кроме того, были подтверждены некоторые характеристики и основные летные данные. Так, тяги двигателей хватало для полета в воздушной атмосфере и выполнения некоторых несложных маневров.
Успешные испытания аппарата SMU не привели к остановке проектных работ. К концу 1962 года стартовала разработка обновленной версии реактивного ранца для астронавтов. В модернизированном варианте проекта предлагалось изменить компоновку аппарата, а также внести в конструкцию некоторые иные коррективы. За счет всего этого предполагалось повысить характеристики, в первую очередь запас «топлива» и основные летные данные. После начала работ по обновленному проекту появилось новое название AMU, которое вскоре начали применять и по отношению к предыдущему изделию SMU, из-за чего возможна некоторая путаница.
По имеющимся данным, модернизированный AMU внешне почти не отличался от базового SMU. Экстерьер корпуса не претерпел серьезных изменений, осталась прежней и система крепления аппарата на спине астронавта. При этом кардинальным образом изменилась компоновка внутренних агрегатов. Дальность полета на уровне 300 м не устроил НАСА, из-за чего было предложено использовать новый топливный бак. Реактивный ранец AMU получил крупный бак для перекиси водорода большой длины, занявший всю центральную часть корпуса. Объем нового бака составлял 660 куб. дюймов (10,81 л). По бокам этого бака расположили прочее оборудование.
Среди прочих агрегатов в новом аппарате сохранился бак для сжатого азота вытеснительной системы подачи пероксида водорода. Согласно проекту, азот должен был подаваться в топливный бак под давлением на уровне 3500 psi (238 атмосферы). Тем не менее, в ходе испытаний использовались меньшие давления: порядка 200 psi (13,6 атм). Опытный образец аппарата AMU оснащался двигателями различной мощности. Так, сопла, отвечающие за перемещение вперед и назад, развивали тягу на уровне 20 фунтов, используемые для передвижений вверх и вниз – по 10 фунтов.
Аппарат AMU в перспективе мог получить систему жизнеобеспечения, однако даже к моменту начала испытаний подобная аппаратура еще не была готова. Из-за этого опытный AMU, как и его предшественник, получил только макет нужной системы с аналогичными габаритами и весом. После завершения всех необходимых проектных работ и испытаний кислородная система могла быть установлена на космический реактивный ранец.
Вскоре после окончания сборки, в самом конце 1962-го или в начале 1963 года, аппарат AMU отправили на базу Райт-Паттерсон для проведения испытаний. «Полигоном» для его проверок вновь стал специально оборудованный самолет KC-135 Zero G. Различные проверки продолжались, как минимум, до конца весны 1963 года.
В середине мая 1963 года авторы проекта подготовили отчет о проведенных испытаниях. К этому времени, как утверждалось в документе, было проведено свыше сотни полетов по параболической траектории, в ходе которых проверялась работа реактивных ранцев в условиях невесомости. За время испытаний, несмотря на малую продолжительность полетов с нулевой гравитацией, удалось освоить управление обоими аппаратами, а также проверить их возможности по транспортировке пилота или грузов.
Ранец AMU во время испытаний. Фото из отчета
В заключительной части отчета утверждалось, что реактивный ранец AMU в существующем виде имеет удовлетворительные характеристики и может использоваться для решения возлагаемых на него задач. Также отмечалось, что тяга двигателей до 20 фунтов достаточна для управляемого полета в нужном направлении и выполнения различных маневров. Выбранное расположение сопел двигателей обеспечивало, как написано в отчете, отличный контроль над аппаратом за счет размещения на равном расстоянии от центра тяжести системы «пилот+ранец».
Автопилот в целом показал себя неплохо, но нуждался в доработках и дополнительных испытаниях. В некоторых ситуациях это устройство не могло правильно среагировать на изменение положения ранца. Кроме того, предлагалось «научить» автоматику управления игнорировать небольшие (до 10°) отклонения аппарата от указанного положения. Такой режим позволял заметно сократить расход перекиси водорода.
Астронавты, которым в будущем предстояло использовать изделие AMU, должны были проходить специальный курс подготовки, в ходе которого они могли бы не только освоить управление, но и научиться «чувствовать» аппарат. Необходимость этого была доказана несколькими тестовыми полетами под управлением пилота с недостаточным уровнем подготовки. В таких случаях пилот действовал медленно и не отличался аккуратностью управления.
В целом, авторы отчета высоко оценили и сам аппарат AMU, и результаты его испытаний. Рекомендовалось продолжить работы по проекту, продолжить совершенствование всей конструкции и ее отдельных компонентов, а также уделить внимание некоторым режимам полета. Все эти меры позволяли рассчитывать на появление работоспособного реактивного ранца для астронавтов, полностью пригодного для решения всех возлагаемых задач.
NASA и Chance-Vought, а также ряд смежных организаций приняли во внимание доклад испытателей и продолжили работы по перспективным проектам. К середине десятилетия на основе наработок по проекту SMU/AMU был разработан новый аппарат, который даже планировалось испытать в открытом космосе.
Дальнейшие работы в области космических реактивных ранцев увенчались успехом. В начале восьмидесятых годов в космос были отправлены первые аппараты MMU, использовавшиеся в составе оборудования космических кораблей Space Shuttle. Эта аппаратура активно применялась в различных миссиях при решении разнообразных задач. Таким образом, идея реактивного ранца, несмотря на массу неудач, дошла до практического применения. Правда, использовать ее стали не на Земле, а в космосе.
По материалам:
http://theverge.com/
http://dtic.mil/
http://flyingcarsandfoodpills.com/
Jet pack turns astronaut into human spacecraft. Popular Science. 1962, №11
Letho S. The Great American Jet Pack: The Quest for the Ultimate Individual Lift Device. Chicago Review Press, 2013
Отчет об испытаниях аппаратов SMU/AMU:
http://dtic.mil/dtic/tr/fulltext/u2/403729.pdf
Информация