Теория и практика сухопутных мобильных робототехнических комплексов

Разработка новых оперативных доктрин, особенно для городских боевых действий и асимметричных конфликтов, потребует новых систем и технических средств, которые позволят снизить потери среди военнослужащих и гражданских. Это возможно реализовать за счет разработок в области СМРК, применения продвинутых технологий наблюдения и сбора информации, а также разведки и обнаружения целей, защиты и высокоточного удара. СМРК, как и их летающие собратья, благодаря широкому применению суперсовременных роботизированных технологий не имеют на борту человека-оператора.
Эти системы также совершенно необходимы для работы в зараженной среде или для выполнения других «тупых, грязных и опасных» задач. Потребность в разработке продвинутых СМРК связана с необходимостью использования безэкипажных систем для непосредственной поддержки на поле боя. По словам некоторых военных экспертов, необитаемые транспортные средства, уровень автономности которых будет последовательно повышаться, станут одним из самых важных тактических элементов в структуре современных сухопутных сил.

Роботизированный комплекс на базе бронеавтомобиля TERRAMAX M-ATV возглавляет колонну безэкипажных машин
Оперативные потребности и развитие СМРК
В конце 2003 года американское центральное командование выпустило срочные, не терпящие отлагательства запросы по системам противодействия угрозе самодельных взрывных устройств (СВУ). Организация по наземным роботизированным системам JGRE (Joint Ground Robotics Enterprise) разработала план, который мог бы быстро обеспечить значительное повышение возможностей за счет использования небольших роботизированных машин. С течением времени эти технологии развивались, развертывалось всё большее число систем, а пользователи для проведения оценки получили продвинутые прототипы. Как результат, увеличилось число военнослужащих и подразделений, задействованных в сфере обеспечения внутренней безопасности, которые научились эксплуатировать продвинутые роботизированные системы.
Управление перспективных оборонных исследований DARPA в настоящее время проводит исследования роботизированных технологий в сфере машинного обучения, основываясь на своих разработках в области искусственного интеллекта, а также распознавания получаемых изображений. Все эти технологии, разрабатываемые в рамках программы UPI (Unmanned Perception Integration – встраивание автоматического восприятия), способны обеспечить лучшее понимание окружающей обстановки/местности транспортным средством с хорошей подвижностью. Результатом этих исследований стала машина, названная CRUSHER, эксплуатационная оценка которой началась еще в 2009 году; с того времени было изготовлено еще несколько прототипов.
Программа MPRS (Man-Portable Robotic System – переносная роботизированная система) в настоящее время сосредоточена на разработке систем автономной навигации и предупреждения столкновений для небольших роботов. В ее рамках также определяются, изучаются и оптимизируются технологии, разработанные для повышения уровня автономности и функциональности роботизированных систем. По программе RACS (Robotic for Agile Combat Support – роботы для маневренной боевой поддержки) разрабатываются различные роботизированные технологии с целью соответствия текущим угрозам и оперативным требованиям, а также будущим потребностям и возможностям. В рамках программы RACS также разрабатываются и интегрируются технологии автоматизации для различных боевых задач и различных платформ на основе использования концепции общей архитектуры и таких фундаментальных характеристик, как например подвижность, скорость, контроль и взаимодействие нескольких машин.
Участие роботов в современных боевых операциях позволяет вооруженным силам получать бесценный опыт их эксплуатации. Появилось несколько интересных направлений, касающихся использования беспилотных летательных аппаратов (БЛА) и СМРК на одном оперативном театре, и военные планирующие органы намерены внимательно их изучить, включая общее управление несколькими платформами, разработку взаимозаменяемых бортовых систем, которые могут устанавливаться как на БЛА, так и на СМРК с целью расширения глобальных возможностей, а также новые технологии для перспективных боевых необитаемых систем.
По экспериментальной программе ARCD (Active Range Clearance Developments – разработки активной прокладки маршрутов) будет разработан так называемый сценарий «обеспечения безопасности зоны автоматическими средствами», в котором несколько СМРК будут работать совместно с несколькими БЛА. Кроме того будет проведена оценка технологических решений касательно использования на безэкипажных платформах радиолокационных станций, оценка интеграции систем управления и контроля и общей эффективности систем. В рамках программы ARCD военно-воздушные силы США планируют разработать технологии, необходимые для повышения эффективности совместных действий СМРК и БЛА (как самолетной, так и вертолетной схем), а также алгоритмы «бесшовной» работы сенсоров всех задействованных платформ, обмена навигационными данными и данными об определенных препятствиях.
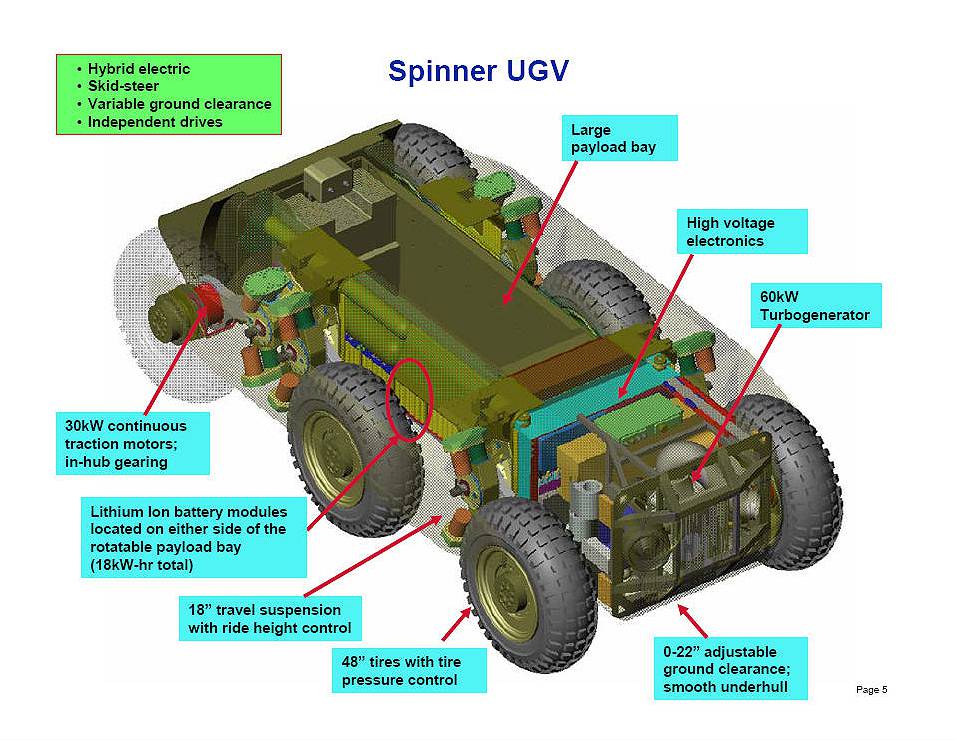
Внутренняя компоновка механических, электрических и электронных компонентов СМРК SPINNER
Исследовательская лаборатория американской армии ARL (Army Research Laboratory) проводит эксперименты в рамках своих исследовательских программ с целью оценки отработанности технологии. Например, ARL проводит эксперименты, в которых оцениваются возможности полностью автономного СМРК обнаруживать и избегать движущихся машин и движущихся людей. Кроме того, Центр по космическим и морским системам вооружения американского флота проводит исследования новых роботизированных технологий и связанных с ними ключевых технических решений, включая автономное картографирование, обход препятствий, продвинутые системы связи и совместные миссии СМРК и БЛА.
Все эти эксперименты с одновременным участием нескольких наземных и воздушных платформ проводятся в реалистичных внешних условиях, характеризующихся комплексным рельефом местности и набором реалистичных задач, во время которых оцениваются возможности всех компонентов и систем. Как часть этих экспериментальных программ (и соответствующей технологической стратегии) в области разработки продвинутых СМРК были определены следующие направления для максимального возврата будущих инвестиций:
- разработка технологий обеспечит технологическую основу для подсистем и компонентов и соответствующую интеграцию в прототипы СМРК для проведения эксплуатационных испытаний;
- ведущие компании в этой сфере разработают продвинутые технологии, необходимые для расширения сферы применения роботизации, например за счет увеличения запаса хода СМРК и увеличения дальности действия каналов связи; и
- программа снижения рисков обеспечит отработку продвинутых технологий для конкретной системы и позволит преодолеть некоторые технологические проблемы.
Благодаря развитию этих технологий СМРК потенциально способны обеспечить революционный скачок вперед в военной сфере, их применение снизит людские потери и повысит боевую эффективность. Однако, для того чтобы достичь этого, они должны быть способны работать самостоятельно, включая и выполнение сложных задач.


Пример вооруженного СМРК. AVANTGUARD израильской компании G-NIUS Unmanned Ground Systems

Продвинутая модульная роботизированная система MAARS (Modular Advanced Armed Robotic System), вооруженная пулеметом и гранатометами
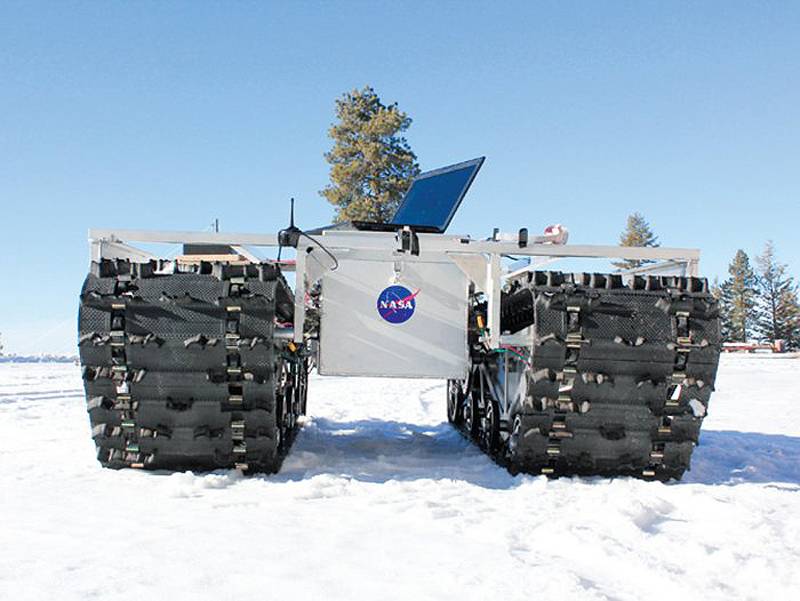
Разработанный НАСА СМРК GROVER на заснеженной местности
Технические требования к продвинутым СМРК
Продвинутые СМРК спроектированы и разработаны для военных задач и работают в основном в опасных условиях. Сегодня многие страны провидит исследования и разработки в области роботизированных беспилотных систем, способных работать в большинстве случаев на пересеченной местности. Современные СМРК могут посылать видеосигналы оператору, информацию о препятствиях, целях и других переменных величинах, интересных с тактической точки зрения, или в случае самых продвинутых систем принимать полностью самостоятельные решения. Фактически, эти системы могут быть полуавтономными, когда для определения маршрута используются навигационные данные наряду с данными бортовых сенсоров и командами удаленного оператора. Полностью автономное транспортное средство само определяет свой собственный курс, используя для выработки маршрута только бортовые сенсоры, но при этом оператор всегда имеет возможность принимать необходимые конкретные решения и брать управление на себя в критических ситуациях или при повреждении машины.
Сегодня современные СМРК могут быстро обнаруживать, идентифицировать, локализовывать и нейтрализовывать многие типы угроз, включая активность противника в условиях радиационного, химического или биологического заражения на различных типах местности. При разработке современных СМРК основной проблемой является создание функционально эффективной конструкции. К ключевым моментам относятся механическая конструкция, комплект бортовых сенсоров и навигационных систем, взаимодействие человека и робота, подвижность, связь и мощность/энергопотребление.
Требования по взаимодействию робота и человека включают весьма сложные человеко-машинные интерфейсы и поэтому для безопасных и дружественных интерфейсов должны быть разработаны мультимодальные технические решения. Современная технология взаимодействия робота и человека очень сложна и потребует множества испытаний и оценок в реалистичных эксплуатационных условиях с целью достижения хороших уровней надежности, как при взаимодействии человек и робот, так и при взаимодействии робот с роботом.

Вооруженный СМРК разработки эстонской компании MILREM
Целью конструкторов является успешная разработка СМРК, способного выполнять свою задачу днем и ночью на сложной по рельефу местности. С целью достижения максимальной эффективности в каждой конкретной ситуации СМРК должны быть способны передвигаться на всех типах местности с наличием препятствий на высокой скорости, с высокой маневренностью и быстро менять направление без значительного снижения скорости. Связанные с подвижностью параметры конструкции также включают кинематические характеристики (прежде всего способность сохранять контакт с грунтом при любых условиях). СМРК имеет кроме преимущества, заключающегося в том, что у него нет ограничений, присущих человеку, также недостаток, состоящий в необходимости интеграции сложных механизмов, способных заменить движения человека. Требования к конструкции касательно ходовых качеств должны быть интегрированы с технологиями восприятия, а также с разработкой сенсоров и программного обеспечения для того, чтобы получить хорошую подвижность и способность обходить препятствия различного типа.
Одним из чрезвычайно важных требований, определяющих высокую подвижность, является способность использовать информацию о природном окружении (подъемы, растительность, камни или вода), искусственных объектах (мосты, дороги или здания), погоде и препятствиях противника (минные поля или заграждения). В этом случае появляется возможность определения своих позиций и позиций противника, а за счет применения значительного изменения скорости и направления шансы СМРК на выживание под вражеским обстрелом значительно повышаются. Подобные технические характеристики делают возможным разработку вооруженных разведывательных СМРК, способных выполнять задачи разведки, наблюдения и обнаружения целей, огневые задачи при наличии комплекса вооружения, а также способных в целях самозащиты обнаруживать угрозы (мины, вражеские системы вооружения и т.д.).
Все эти боевые возможности должны реализовываться в реальном времени для того, чтобы избегать угроз и нейтрализовать противника, используя либо собственное оружие, либо каналы связи с удаленными системами вооружения. Высокая мобильность и способность локализовывать и отслеживать цели и активность противника в сложных боевых условиях является крайне важными. Для этого необходима разработка интеллектуальных СМРК, способных за счет встроенных комплексных алгоритмов распознавания передвижений отслеживать вражескую активность в реальном времени.
Продвинутые возможности, включая сенсоры, алгоритмы для объединения данных, активную визуализацию и обработку данных, весьма важны и для этого необходима современная аппаратная и программная архитектура. При выполнении задачи в современных СМРК для оценки местоположения используются система GPS, блок инерциальных измерений, инерциальная навигационная система.
Используя навигационные данные, полученные благодаря этим системам, СМРК может самостоятельно перемещаться в соответствии с командами бортовой программы или системы дистанционного управления. В тоже время, СМРК способен через короткие промежутки времени отправлять навигационные данные на станцию дистанционного управления для того, чтобы оператор знал о его точном местоположении. Полностью автономные СМРК могут планировать свои действия, а для этого совершенно необходима разработка маршрута, исключающего столкновения, при одновременной минимизации таких фундаментальных параметров, как время, энергия и дистанция. Для прокладывания оптимального маршрута и его коррекции могут использоваться навигационный компьютер и компьютер с информацией (для эффективного обнаружения препятствий могут использоваться лазерные дальномеры и ультразвуковые датчики).
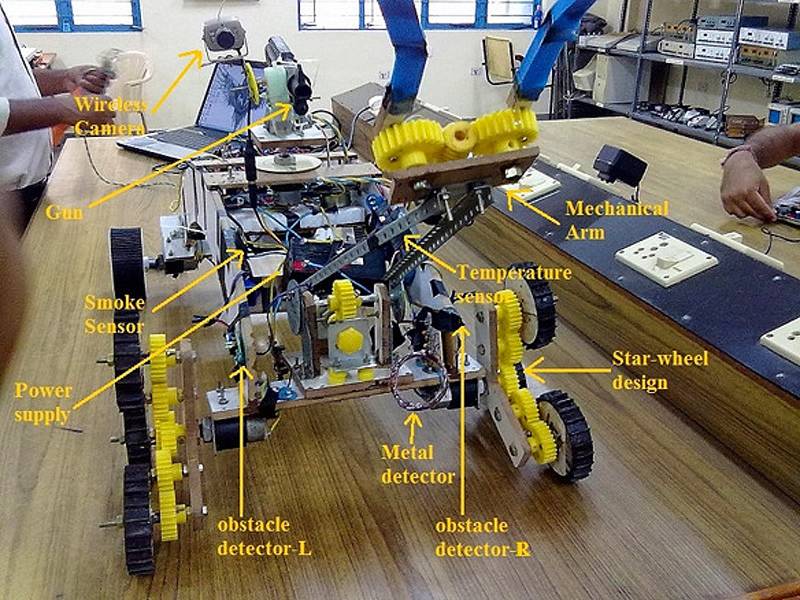
Составные части прототипа вооруженного СМРК, разработанного индийскими студентами
Проектирование навигационной и коммуникационной систем
Другой важной проблемой разработки эффективного СМРК является проектирование навигационной/коммуникационной системы. Цифровые камеры и сенсоры устанавливаются для получения визуальной обратной связи, при этом для работы в ночных условиях устанавливаются инфракрасные системы; оператор может видеть видеоизображение на своем компьютере и отправлять некоторые базовые навигационные команды на СМРК (вправо/влево, стоп, вперед) для корректировки навигационных сигналов.
В случае полностью автономных СМРК системы визуализации интегрируются с навигационными системами, базирующимися на цифровых картах и данных GPS. Для создания полностью автономного СМРК, для таких базовых функций, как например навигационная, потребуется интеграция систем восприятия внешних условий, планирования маршрута и канал связи.
В то время как интеграция систем навигации для одиночных СМРК находится на продвинутых стадиях, разработка алгоритмов для планирования одновременной работы нескольких СМРК и совместных задач СМРК и БЛА находится на начальной стадии, поскольку весьма сложно наладить коммуникационное взаимодействие сразу нескольких роботизированных систем. Ведущиеся эксперименты помогут определить какие частоты и диапазоны частот необходимы и как будут варьироваться требования для конкретной задачи. Как только эти характеристики будут определены, станет возможным разработка продвинутых функций и программного обеспечения для нескольких роботизированных машин.

Беспилотный вертолет K-MAX транспортирует роботизированный аппарат SMSS (Squad Mission Support System) во время испытаний на автономность; при этом пилот находился в кабине K-MAX, но не управлял им
Средства коммуникации очень важны для функционирования СМРК, но беспроводные решения имеют довольно существенные недостатки, поскольку установившаяся связь может быть потеряна из-за помех, связанных с рельефом, препятствиями или активностью вражеской системы радиоэлектронного подавления. Очень интересны недавние разработки по системам связи «машина-машина» и благодаря этим исследованиям может быть создано доступное и эффективное оборудование для связи между роботизированными платформами. Стандарт специальной связи ближнего действия DRSC (Dedicated Short-Range Communication) будет применяться в реальных условиях для связи между СМРК и между СМРК и БЛА. Большое внимание в настоящее время уделяется обеспечению безопасности связи в сетецентрических операциях и поэтому будущие проекты в области обитаемых и необитаемых систем должны базироваться на продвинутых решениях, соответствующих стандартам общего интерфейса.
Сегодня требования, предъявляемые к непродолжительным задачам с низким энергопотреблением, в основном выполняются, но существуют проблемы с платформами, выполняющими продолжительные задачи с большим энергопотреблением, в частности одной из актуальнейших проблем является передача потокового видео.
Топливо
Варианты источников энергии зависят от типа системы: для небольших СМРК источник энергии может быть продвинутым перезаряжаемым аккумулятором, но для более крупных СМРК необходимую энергию может вырабатывать обычное топливо, что позволяет реализовать схему с электродвигателем-генератором или гибридным электрическим движителем нового поколения. Самыми очевидными факторами, влияющими на энергоснабжение, являются внешние условия, масса и размеры машины, а также время выполнения задачи. В некоторых случаях система энергоснабжения должна состоять из топливной системы в качестве основного источника и перезаряжаемого аккумулятора (снижение заметности). Выбор подходящего вида энергии зависит от всех факторов, которые влияют на выполнение задачи, а источник энергии должен обеспечивать требуемую мобильность, бесперебойную работу системы связи, сенсорного комплекта и комплекса вооружения (при наличии).
Кроме того, необходимо решать технические проблемы, связанные с подвижностью на сложных рельефах, восприятием препятствий и самостоятельным исправлением ошибочных действий. В рамках современных проектов разработаны новые продвинутые роботизированные технологии касательно интеграции бортовых сенсоров и обработки данных, выбора маршрута и навигации, обнаружения, классификации и избежания препятствий, а также устранения ошибок, связанных с потерей связи и дестабилизацией платформы. Для автономной навигации по бездорожью необходимо, чтобы машина различала местность, а это включает 3D-орографию местности (описание рельефа) и определение препятствий, например камней, деревьев, непроточных водоемов и т.д. Общие возможности постоянно повышаются и сегодня уже можно говорить о достаточно высоком уровне определения образа местности, но только в дневное время и в хорошую погоду, а вот возможности роботизированных платформ в неизвестном пространстве и при плохих погодных условиях пока недостаточны. В связи с этим DARPA выполняет несколько экспериментальных программ, где проверяются возможности роботизированных платформ на неизвестной местности, при любой погоде, днем и ночью. В рамках программы DARPA, названной Applied Research in AI (прикладные исследования в области искусственного интеллекта), проводятся исследования интеллектуальных средств принятия решений и других продвинутых технологических решений для автономных систем с целью конкретного применения в перспективных роботизированных системах, а также разрабатываются автономные многороботовые обучающие алгоритмы для выполнения совместных задач, что позволит группам роботов автоматически обрабатывать новые задания и перераспределять между собой роли.
Как уже было упомянуто, условия эксплуатации и тип задачи определяют конструкцию современного СМРК, который представляет собой мобильную платформу с источником энергоснабжения, сенсорами, компьютерами и программной архитектурой для восприятия, навигации, коммуникации, обучения/адаптации, взаимодействия между роботом и человеком. В будущем они будут более многосторонними, будут иметь повышенный уровень унификации и взаимодействия, а также будут более эффективными с экономической точки зрения. Особый интерес представляют системы с модульной полезной нагрузкой, которая позволяет адаптировать машины для разных задач. В следующем десятилетии станут доступны роботизированные транспортные средства для выполнения тактических операций и защиты баз и другой инфраструктуры, базирующиеся на открытой архитектуре. Они будут характеризоваться значительным уровнем унифицированности и автономности, высокой мобильностью и модульными бортовыми системами.
Технология СМРК для военного применения быстро развивается, что позволит многим вооруженным силам убрать солдат из опасных задач, включая обнаружение и уничтожение СВУ, разведку, защиту своих сил, разминирование и многое другое. Например, концепция бригадных боевых групп американской армии благодаря продвинутому компьютерному моделированию, боевой подготовке и опыту реальных боевых операций продемонстрировала, что роботизированные транспортные средства повысили живучесть наземных машин с экипажами и содействовали значительному повышению боевой эффективности. Развитие перспективных технологий, как например подвижность, автономность, оснащение вооружением, интерфейсы человек-машина, искусственный интеллект для роботизированных систем, интеграция с другими СМРК и обитаемыми системами, позволит обеспечить повышение возможностей необитаемых наземных систем и уровня их автономности.


Российский ударный роботизированный комплекс Платформа–М разработки НИТИ "Прогресс"
Использованы материалы:
www.defense-update.com
www.qinetiq.com
www.milrem.ee
www.darpa.mil
www.airforce.com
www.niti-progress.ru
www.wikipedia.org
ru.wikipedia.org
Информация