Время роботопехоты: предварительные прикидки (продолжение)
Параметры робота-пулеметчика
Итак, робот-пулеметчик поменьше и без лишней универсальности уже есть среди российских опытных образцов – это упомянутый робот «Стрелок» с одним пулеметом и с габаритами: длина 164 см, ширина 70 см, высота 96 см. Он позиционируется как робот для боев в городских условиях, даже внутри зданий.
Есть уже обкатанный робот «Платформа-М» с вполне приличными ходовыми качествами, неплохой проходимостью на разных грунтах и автономностью в районе 10 часов – его размеры ближе к идеалу: длина робота составляет 160 сантиметров, а ширина и высота не превышают 120 сантиметров при массе 800 килограммов.

Уменьшив высоту и ширину данного робота, сократив вооружение до одного пулемета на турели и переделав бронирование, заменив сталь алюминием, вполне можно создать идеального массового робота-пехотинца весом в 300 кг, шириной около 1000-1100 мм, длиной до 1500 мм, с камерами наблюдения впереди и сзади, камерой прицеливания на турели ограниченной подвижности (сектор обстрела по 40 градусов от оси движения) с одним пулеметом типа ПКТ (боезапас от 1000 патронов). Если удастся ещё и увеличить скорость хода от 12 км/час до 15 км/час (как у бегущего пехотинца), то можно будет запускать его в серию в качестве основы роботопехоты.
У американцев есть робот ещё меньше: чисто электрический малыш MAARS от фирмы QinetiQ, с автономностью в 8 часов, весом всего около 170 кг, ростом по пояс, турель больше корпуса — как раз тот случай, когда робот уж слишком маленький. Его боезапас для единого пулемета M240, равный 450 патронам калибра 7,62 мм, наводит на мысль, что на нормальный бой его не хватит, остойчивость робота оставляет желать лучшего, а скорость в 12-13 км/час маловата.

Его ещё более легкий (45 кг) и невзрачный прототип SWORDS/TALON предыдущей модели имел опыт применения на войне (Ирак и Афганистан). Известна и цена таких малышей: базовый робот без оружия стоил приблизительно $60 000. Стоимость SWORDS с турелью и оружием составляет $230 000, однако производитель утверждает, что при серийном выпуске цена может снизиться до $150 000, что конечно много, но уже не запредельно дорого.

Транспортировка и развертывание роботов перед боем
Оптимально компактные роботы весом около 300 кг можно возить в подвешенном состоянии на специальных штангах сзади за БМП или БТР (по две-три штуки), не увеличивая тем самым поперечных габаритов машины. Так как из БТР-70/80/90 высадка десанта идет с боков, то никому такие роботы сзади машины мешать не будут — их можно вешать ниже уровня крыши БТР. На БТР-80 с шириной около 2,9 метра можно закрепить по два робота шириной 1 метр.
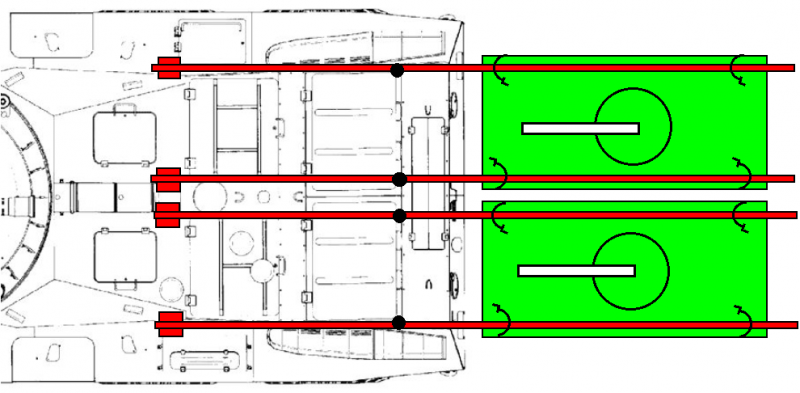
Схема крепления двух роботов-пулеметчиков сзади за БТР-90. Вид сверху.
Каждый робот крепится к двум продольным (круглым в сечении) трубам-штангам четырьмя кольцами на верху своего корпуса вдоль левого и правого бока (по два кольца на штангу), раскрываемыми электромагнитными замками (управляются самим роботом, но радиокоманда от командира отделения, с пульта БМП/БТР имеет безусловный приоритет).
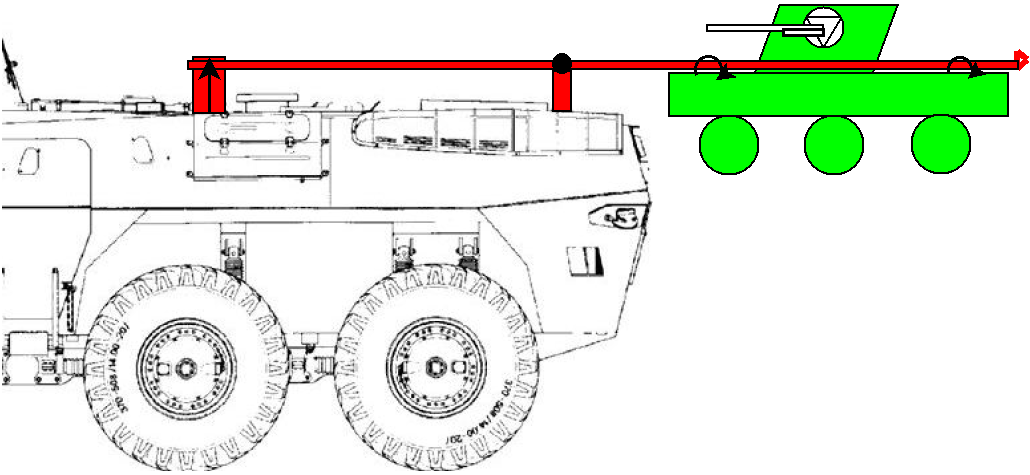
Детали схемы крепления двух роботов-пулеметчиков сзади за БТР-90 — вид сбоку.
Перед атакой эти штанги позади машины опускаются (или, скорее, наклоняются назад), роботы сползают по ним своими кольцами, отцепляются, открывая кольца, удерживающие их на штангах — как бы прыгают вниз, сдают назад, объезжают БМП/БТР, выстраиваются в 30-40 метров спереди.
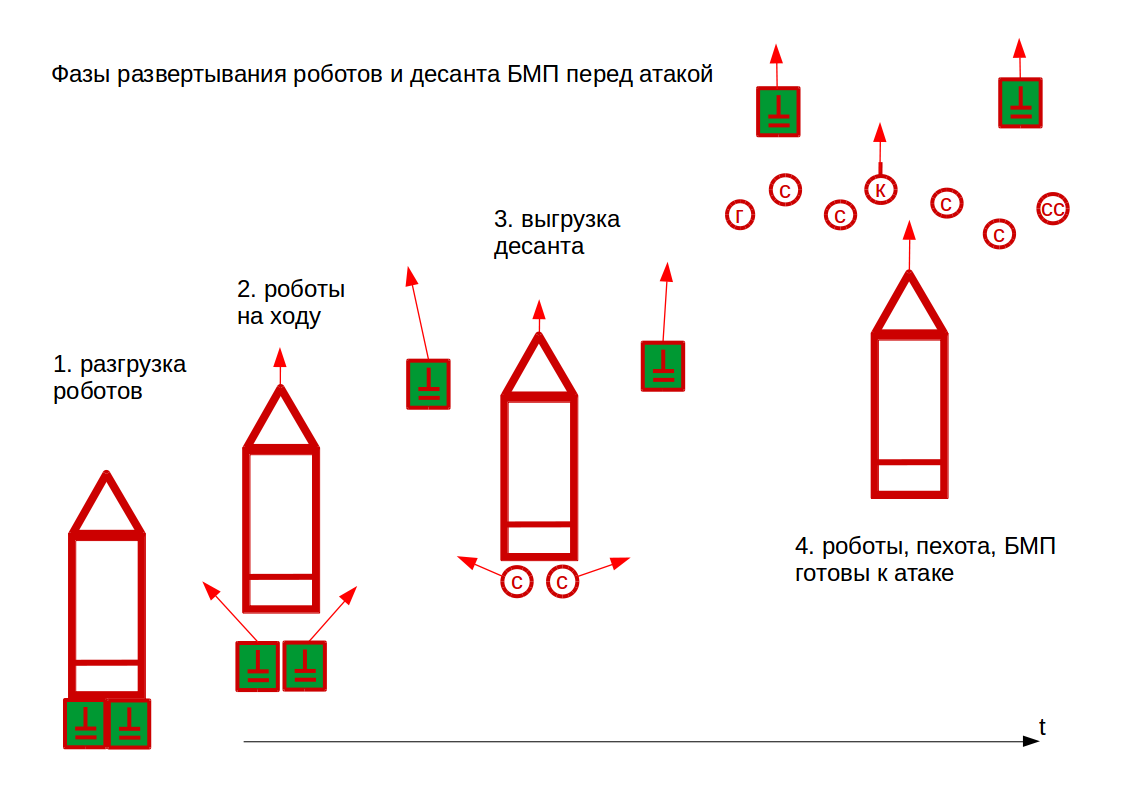
Порядок развертывания роботов и десанта из БМП перед атакой.
На БМП-2 (с шириной машины около 3,15 метра), БПМ-3 (с шириной около 3,3 метра) в один ряд сзади можно разместить до трех роботов (шириной 1 метр). К сожалению, размещая роботов сзади на раме, конструкторы столкнутся с неприятной проблемой: нельзя загораживать висящими сзади роботами задние двери десантного отделения – ведь этот эвакуационный выход для десанта всегда должен быть свободен! Придется подвешивать роботов повыше, так чтобы их траки не мешали распахиванию задних дверей. К сожалению, это ограничит сектор обстрела орудия и пулемета в башне БМП-2: они не смогут стрелять прямо назад — там будут торчать роботы. Но как часто такая стрельба нужна в бою? Потеряв задний сектор обстрела вооружением БМП такой комплекс (БМП + возимые роботы) выиграет в добавлении быстро разворачиваемых роботов с пулеметами. На БМП-3 размещение рамы для роботов на крыше моторного отделения может помешать распахиванию люков для десанта — возможно пару роботов в случае БМП-3 надо подвесить точно за кормой машины. БМП-3 «Драгун» с передним расположением двигателя и рампой для десанта сзади подойдет та же схема размещения роботов, как в случае с БМП-2.
На БМП «Курганец-25» и БМП Т-15 (с шириной около 3,2 м) пару роботов можно разместить сзади, но пониже крыши корпуса, по обе стороны от рампы/двери десанта, так, что бы не мешать раскрытию рампы, открытию двери и вращению башни этой машины.
Размещение двух роботов за кормой БМП «Курганец-25» — вид сзади.
Аналогичная схема размещения роботов подойдет и для новых БТР «Бумеранг» К-17. Очевидно, что в среднем получается по два робота на БТР или БМП (три робота разместить можно не всегда).
Таким образом, в взводе будет 2х3=6 роботов-пехотинцев, а в роте роботов будет 18 штук (или 20 штук, если навешивать роботов и на командирскую машину). 20 штук — это около четверти пеших пехотинцев, участвующих в атаке. В такой роте можно сократить пулеметчиков (по одному в каждой машине) или вооружить их автоматами.
Действия роботов-пулеметчиков в обороне
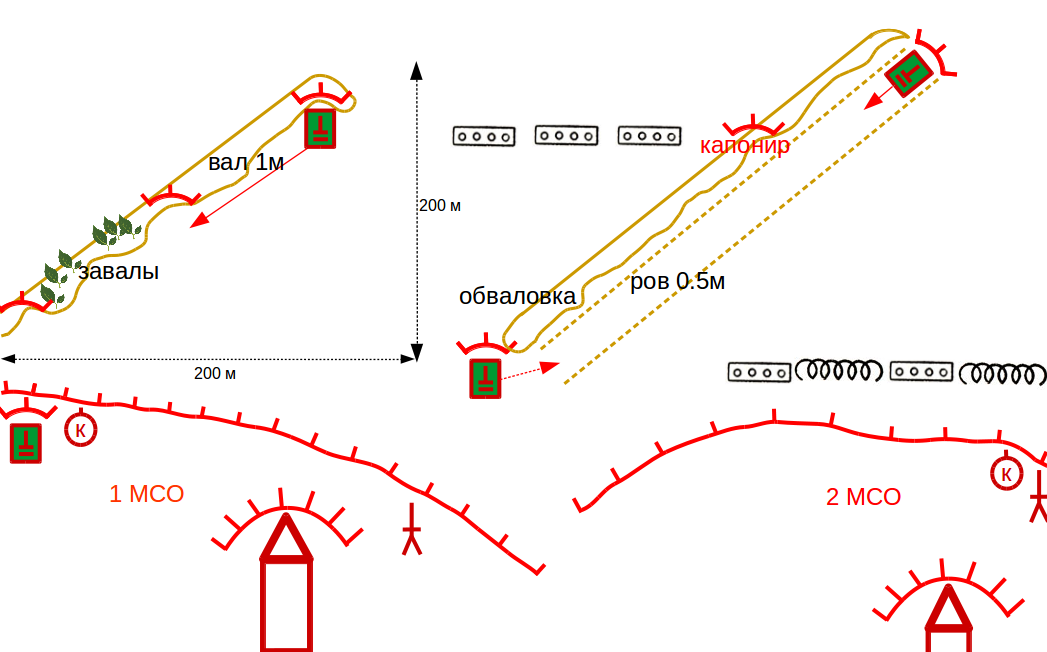
В обороне такие роботы могут занимать отдельные неглубокие капониры впереди своей пехоты, а могут и вести активную оборону, например передвигаясь и ведя огонь из-за длинных насыпей (из канав) проложенных под углом примерно 45 градусов к позиции роты и выступающих на 100-300-метров вперед — как это показано на Рисунке 6.
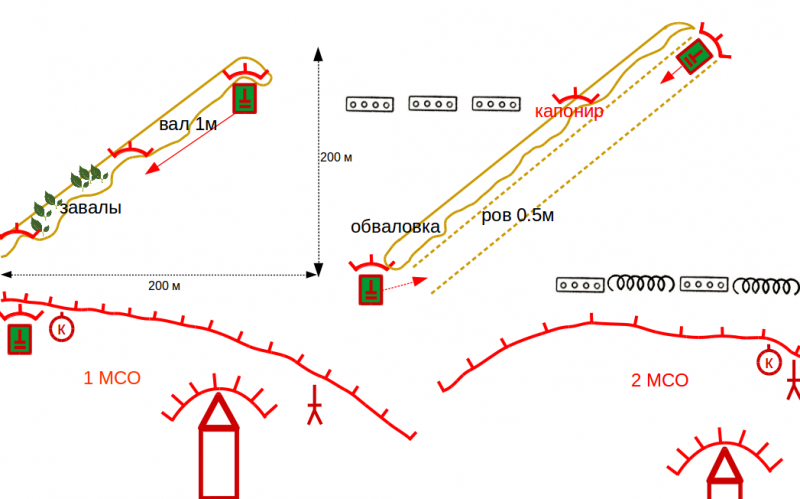
Роботы-пулеметчики в обороне перед основной позицией пехоты.
Такого рода сложная конфигурация рубежа обороны (в виде режущей кромки пилы) вполне способна спутать планы противника, помешать ему точно определить силы и средства обороняющихся, ввести в заблуждение насчет реального местоположения рубежа роты вражеских корректировщиков арт-огня, заранее нарушить боевые порядки наступающих на 200-300 метров дальше от основной позиции роты. При этом роботы в такой конфигурации всегда могут быть оперативно отозваны назад, на рубеж роты или в тыл.
Группа обслуживания роботов
Для обслуживания роботов-пехотинцев, ремонта и экстренного управления роботами потребуется ввести в структуру роты специальное ремонтно-эвакуационное подразделение из 6-7 человек (2 оператора, 1-2 ремонтника, механик-водитель, командир и его помощник) с одним бронетранспортером типа МТ-ЛБ, в кабине которого можно оборудовать пару пультов дистанционного управления. Такое «управление роботов роты» с парой операторов нужно для решения конкретных проблем отдельных «заблудившихся» роботов, которые сами не в состоянии выбраться из нестандартной ситуации. Например, когда робот, следуя общим фронтом взвода на рубеж атаки, заехал в П-образный тупик-препятствие и не может выехать из него задним ходом. Или когда робот просто упал в глубокую яму, а солдаты вокруг уже ушли далеко вперед. Таким образом на 20-30 роботов понадобятся всего два оператора в ближнем тылу роты. Они же помощники ремонтников роботов между боями.
В кузове такого бронетранспортера-снабженца можно возить запасные части, а на крыше/раме сзади крепить пару запасных роботов-пехотинцев и один робот-эвакуатор (например на базе робота «Нерехта») для эвакуации подбитых роботов.
Таким образом, рота с роботопехотой сократится на 10 живых пулеметчиков, которых с лихвой заменят 20 роботов-пулеметчиков. При этом все машины роты усложняются и утяжеляются (примерно на 0.7-0.8 тонны), а в роту добавляется всего один бронетранспортер МТ-ЛБ и 6-7 человек для обслуживания парка роботов-пехотинцев.
Новое обозначение для пехоты с роботами
Чтобы не возникало путаницы между собственно роботопехотой (я имею в виду отдельно самих роботов-пехотинцев) и подразделением (ротой) из мотострелков с роботами-пехотинцами, предлагаю называть такую смешанную пехоту новым термином «полупехота» (так как она лишь наполовину или на две трети состоит из людей).
Рассмотренные в этой статье соображения, конечно же, являются сугубо предварительными оценками возможности применения роботов вместе с обычной пехотой. Понятно, что исследования, эксперименты и жизнь внесут свои серьезные коррективы, но суть предложения, изложенного мной в двух статьях, от этого не меняется: роботов можно и нужно учится применять не отдельно, а вместе с пехотой. Не стоит ждать того прекрасного времени, когда робот станет полностью автономным и равным в интеллекте пехотинцу. Уже сейчас роботы в пехотном строю вполне могут "позаимствовать" часть интеллекта у пехотинцев и их командиров (в виде общих предварительных целей атаки, текущего направления движения пехотной цепи, целеуказаний). Конечно, это потребует определенного дооснащения пехоты лазерными целеуказателями, системами определения координат, шифрованной радиопередачи данных и компактными процессорами, но это уже и так происходит в ходе совершенствования информационного обеспечения пехотных подразделений.
Если статья вызовет интерес читателей, готов продолжить тему обсуждением вариантов других типов пехотных роботов: робота-минометчика и малозаметного черепахоподобного робота-ракетометчика.
Итак, робот-пулеметчик поменьше и без лишней универсальности уже есть среди российских опытных образцов – это упомянутый робот «Стрелок» с одним пулеметом и с габаритами: длина 164 см, ширина 70 см, высота 96 см. Он позиционируется как робот для боев в городских условиях, даже внутри зданий.
Есть уже обкатанный робот «Платформа-М» с вполне приличными ходовыми качествами, неплохой проходимостью на разных грунтах и автономностью в районе 10 часов – его размеры ближе к идеалу: длина робота составляет 160 сантиметров, а ширина и высота не превышают 120 сантиметров при массе 800 килограммов.
Уменьшив высоту и ширину данного робота, сократив вооружение до одного пулемета на турели и переделав бронирование, заменив сталь алюминием, вполне можно создать идеального массового робота-пехотинца весом в 300 кг, шириной около 1000-1100 мм, длиной до 1500 мм, с камерами наблюдения впереди и сзади, камерой прицеливания на турели ограниченной подвижности (сектор обстрела по 40 градусов от оси движения) с одним пулеметом типа ПКТ (боезапас от 1000 патронов). Если удастся ещё и увеличить скорость хода от 12 км/час до 15 км/час (как у бегущего пехотинца), то можно будет запускать его в серию в качестве основы роботопехоты.
У американцев есть робот ещё меньше: чисто электрический малыш MAARS от фирмы QinetiQ, с автономностью в 8 часов, весом всего около 170 кг, ростом по пояс, турель больше корпуса — как раз тот случай, когда робот уж слишком маленький. Его боезапас для единого пулемета M240, равный 450 патронам калибра 7,62 мм, наводит на мысль, что на нормальный бой его не хватит, остойчивость робота оставляет желать лучшего, а скорость в 12-13 км/час маловата.
Его ещё более легкий (45 кг) и невзрачный прототип SWORDS/TALON предыдущей модели имел опыт применения на войне (Ирак и Афганистан). Известна и цена таких малышей: базовый робот без оружия стоил приблизительно $60 000. Стоимость SWORDS с турелью и оружием составляет $230 000, однако производитель утверждает, что при серийном выпуске цена может снизиться до $150 000, что конечно много, но уже не запредельно дорого.

Транспортировка и развертывание роботов перед боем
Оптимально компактные роботы весом около 300 кг можно возить в подвешенном состоянии на специальных штангах сзади за БМП или БТР (по две-три штуки), не увеличивая тем самым поперечных габаритов машины. Так как из БТР-70/80/90 высадка десанта идет с боков, то никому такие роботы сзади машины мешать не будут — их можно вешать ниже уровня крыши БТР. На БТР-80 с шириной около 2,9 метра можно закрепить по два робота шириной 1 метр.
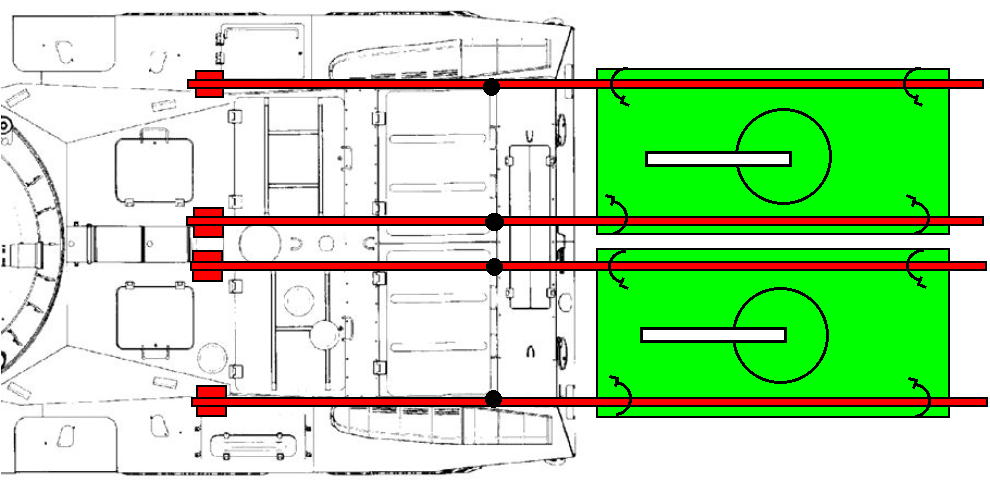
Схема крепления двух роботов-пулеметчиков сзади за БТР-90. Вид сверху.
Каждый робот крепится к двум продольным (круглым в сечении) трубам-штангам четырьмя кольцами на верху своего корпуса вдоль левого и правого бока (по два кольца на штангу), раскрываемыми электромагнитными замками (управляются самим роботом, но радиокоманда от командира отделения, с пульта БМП/БТР имеет безусловный приоритет).
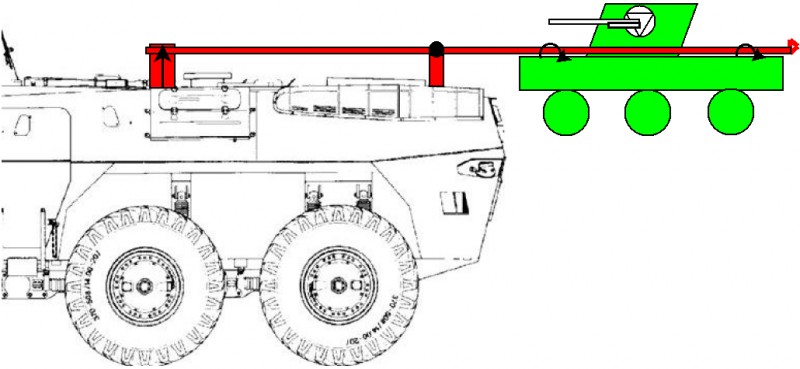
Детали схемы крепления двух роботов-пулеметчиков сзади за БТР-90 — вид сбоку.
Перед атакой эти штанги позади машины опускаются (или, скорее, наклоняются назад), роботы сползают по ним своими кольцами, отцепляются, открывая кольца, удерживающие их на штангах — как бы прыгают вниз, сдают назад, объезжают БМП/БТР, выстраиваются в 30-40 метров спереди.
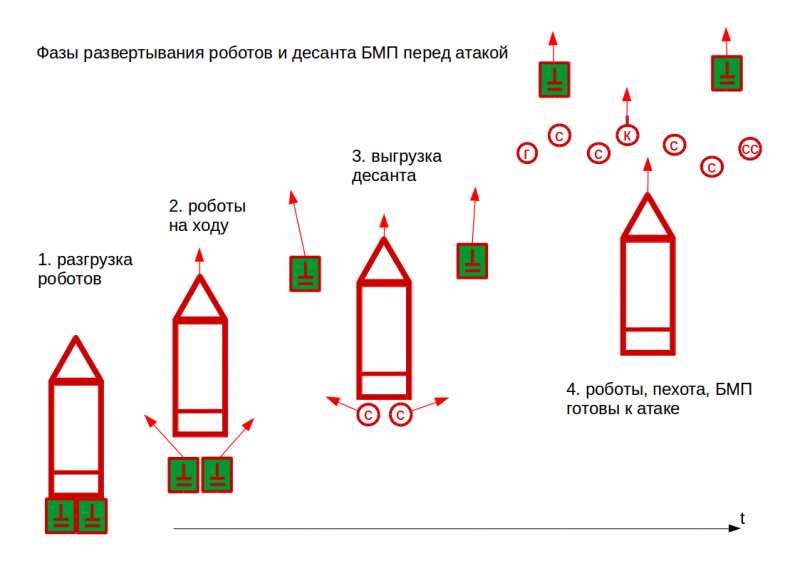
Только потом (на рубеже спешивания) из БМП выбегают пехотинцы и развертываются в цепь позади роботов. Роботы ведут атаку, двигаясь впереди цепи пехоты, ориентируясь на солдат справа и слева. Начиная с рубежа перехода в атаку, оружие роботов деблокируется, и роботы начинают вести огонь по мере получения целеуказаний от пехотинцев (с помощью подсвета целей лазерами пехоты).
Порядок развертывания роботов и десанта из БМП перед атакой.
На БМП-2 (с шириной машины около 3,15 метра), БПМ-3 (с шириной около 3,3 метра) в один ряд сзади можно разместить до трех роботов (шириной 1 метр). К сожалению, размещая роботов сзади на раме, конструкторы столкнутся с неприятной проблемой: нельзя загораживать висящими сзади роботами задние двери десантного отделения – ведь этот эвакуационный выход для десанта всегда должен быть свободен! Придется подвешивать роботов повыше, так чтобы их траки не мешали распахиванию задних дверей. К сожалению, это ограничит сектор обстрела орудия и пулемета в башне БМП-2: они не смогут стрелять прямо назад — там будут торчать роботы. Но как часто такая стрельба нужна в бою? Потеряв задний сектор обстрела вооружением БМП такой комплекс (БМП + возимые роботы) выиграет в добавлении быстро разворачиваемых роботов с пулеметами. На БМП-3 размещение рамы для роботов на крыше моторного отделения может помешать распахиванию люков для десанта — возможно пару роботов в случае БМП-3 надо подвесить точно за кормой машины. БМП-3 «Драгун» с передним расположением двигателя и рампой для десанта сзади подойдет та же схема размещения роботов, как в случае с БМП-2.
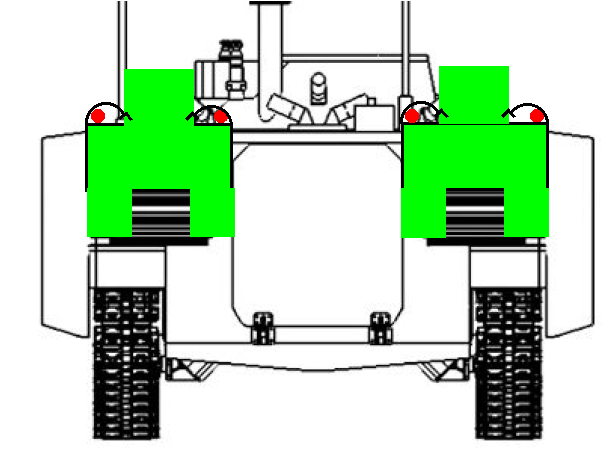
На БМП «Курганец-25» и БМП Т-15 (с шириной около 3,2 м) пару роботов можно разместить сзади, но пониже крыши корпуса, по обе стороны от рампы/двери десанта, так, что бы не мешать раскрытию рампы, открытию двери и вращению башни этой машины.
Размещение двух роботов за кормой БМП «Курганец-25» — вид сзади.
Аналогичная схема размещения роботов подойдет и для новых БТР «Бумеранг» К-17. Очевидно, что в среднем получается по два робота на БТР или БМП (три робота разместить можно не всегда).
Таким образом, в взводе будет 2х3=6 роботов-пехотинцев, а в роте роботов будет 18 штук (или 20 штук, если навешивать роботов и на командирскую машину). 20 штук — это около четверти пеших пехотинцев, участвующих в атаке. В такой роте можно сократить пулеметчиков (по одному в каждой машине) или вооружить их автоматами.
Действия роботов-пулеметчиков в обороне
В обороне такие роботы могут занимать отдельные неглубокие капониры впереди своей пехоты, а могут и вести активную оборону, например передвигаясь и ведя огонь из-за длинных насыпей (из канав) проложенных под углом примерно 45 градусов к позиции роты и выступающих на 100-300-метров вперед — как это показано на Рисунке 6.
Роботы-пулеметчики в обороне перед основной позицией пехоты.
Такого рода сложная конфигурация рубежа обороны (в виде режущей кромки пилы) вполне способна спутать планы противника, помешать ему точно определить силы и средства обороняющихся, ввести в заблуждение насчет реального местоположения рубежа роты вражеских корректировщиков арт-огня, заранее нарушить боевые порядки наступающих на 200-300 метров дальше от основной позиции роты. При этом роботы в такой конфигурации всегда могут быть оперативно отозваны назад, на рубеж роты или в тыл.
Группа обслуживания роботов
Для обслуживания роботов-пехотинцев, ремонта и экстренного управления роботами потребуется ввести в структуру роты специальное ремонтно-эвакуационное подразделение из 6-7 человек (2 оператора, 1-2 ремонтника, механик-водитель, командир и его помощник) с одним бронетранспортером типа МТ-ЛБ, в кабине которого можно оборудовать пару пультов дистанционного управления. Такое «управление роботов роты» с парой операторов нужно для решения конкретных проблем отдельных «заблудившихся» роботов, которые сами не в состоянии выбраться из нестандартной ситуации. Например, когда робот, следуя общим фронтом взвода на рубеж атаки, заехал в П-образный тупик-препятствие и не может выехать из него задним ходом. Или когда робот просто упал в глубокую яму, а солдаты вокруг уже ушли далеко вперед. Таким образом на 20-30 роботов понадобятся всего два оператора в ближнем тылу роты. Они же помощники ремонтников роботов между боями.
В кузове такого бронетранспортера-снабженца можно возить запасные части, а на крыше/раме сзади крепить пару запасных роботов-пехотинцев и один робот-эвакуатор (например на базе робота «Нерехта») для эвакуации подбитых роботов.
Таким образом, рота с роботопехотой сократится на 10 живых пулеметчиков, которых с лихвой заменят 20 роботов-пулеметчиков. При этом все машины роты усложняются и утяжеляются (примерно на 0.7-0.8 тонны), а в роту добавляется всего один бронетранспортер МТ-ЛБ и 6-7 человек для обслуживания парка роботов-пехотинцев.
Новое обозначение для пехоты с роботами
Чтобы не возникало путаницы между собственно роботопехотой (я имею в виду отдельно самих роботов-пехотинцев) и подразделением (ротой) из мотострелков с роботами-пехотинцами, предлагаю называть такую смешанную пехоту новым термином «полупехота» (так как она лишь наполовину или на две трети состоит из людей).
Рассмотренные в этой статье соображения, конечно же, являются сугубо предварительными оценками возможности применения роботов вместе с обычной пехотой. Понятно, что исследования, эксперименты и жизнь внесут свои серьезные коррективы, но суть предложения, изложенного мной в двух статьях, от этого не меняется: роботов можно и нужно учится применять не отдельно, а вместе с пехотой. Не стоит ждать того прекрасного времени, когда робот станет полностью автономным и равным в интеллекте пехотинцу. Уже сейчас роботы в пехотном строю вполне могут "позаимствовать" часть интеллекта у пехотинцев и их командиров (в виде общих предварительных целей атаки, текущего направления движения пехотной цепи, целеуказаний). Конечно, это потребует определенного дооснащения пехоты лазерными целеуказателями, системами определения координат, шифрованной радиопередачи данных и компактными процессорами, но это уже и так происходит в ходе совершенствования информационного обеспечения пехотных подразделений.
Если статья вызовет интерес читателей, готов продолжить тему обсуждением вариантов других типов пехотных роботов: робота-минометчика и малозаметного черепахоподобного робота-ракетометчика.
Информация